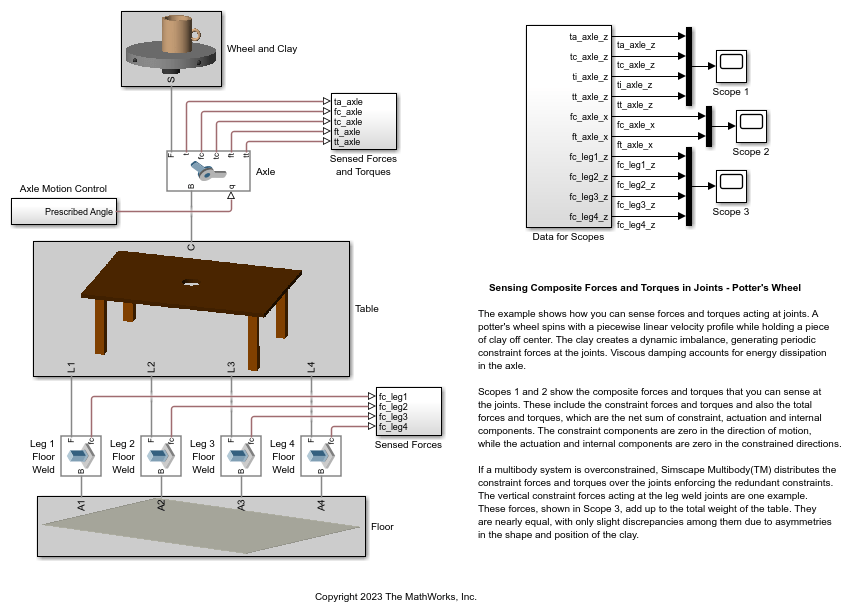
Sensing Composite Forces and Torques in Joints - Potter's Wheel
The example shows how you can sense forces and torques acting at joints. A potter's wheel spins with a piecewise linear velocity profile while holding a piece of clay off center. The clay creates a dynamic imbalance, generating periodic constraint forces at the joints. Viscous damping accounts for energy dissipation in the axle.
Scopes 1 and 2 show the composite forces and torques that you can sense at the joints. These include the constraint forces and torques and also the total forces and torques, which are the net sum of constraint, actuation and internal components. The constraint components are zero in the direction of motion, while the actuation and internal components are zero in the constrained directions.
If a multibody system is overconstrained, Simscape™ Multibody™ distributes the constraint forces and torques over the joints enforcing the redundant constraints. The vertical constraint forces acting at the leg weld joints are one example. These forces, shown in Scope 3, add up to the total weight of the table. They are nearly equal, with only slight discrepancies among them due to asymmetries in the shape and position of the clay.