Property Proving Workflow for Cruise Control
This example shows how to find a property violation by using Simulink® Design Verifier™ property proving analysis. You model safety requirements as properties and then verify the design model against requirements.
When you perform property proving analysis, Simulink Design Verifier generates a counterexample that you use to debug the property violation.
Step 1: Open the Model
The sldvdemo_cruise_control_verification model contains a model reference to the sldvdemo_cruise_control_defective design model. The design model is a cruise control system that consists of a PI Controller that computes the throttle output based on the difference between the actual and target speed.
open_system('sldvdemo_cruise_control_verification');

The safety properties for the throttle output are modeled in the Safety Properties verification subsystem by the Assertion block.
open_system('sldvdemo_cruise_control_verification/Safety Properties');

Step 2: Perform Property Proving Analysis
On the Design Verifier tab, click Prove Properties.
After the analysis completes, the Results Summary window reports that one objective was falsified.
The harness model is generated and displays the counterexample.

Step 3: Simulate the Counterexample to Replicate the Error
In the harness model window, click the Run All button. Double-click on Counterexample_1 block to open the Signal Editor dialog box. Click on Launch Signal Editor block icon to open the Signal Editor.

The Signal Editor window displays an error stating that the simulation was terminated because an assertion occurred at time 0.04.
Optionally, you can debug the property violation by using the Model Slicer. For more information, see Debug Property Proving Violations by Using Model Slicer.
Step 4: Open the Fixed Model
The erroneous behavior exhibited by the counter example is fixed in the sldvdemo_cruise_control_verification_fixed model.
open_system('sldvdemo_cruise_control_verification_fixed');
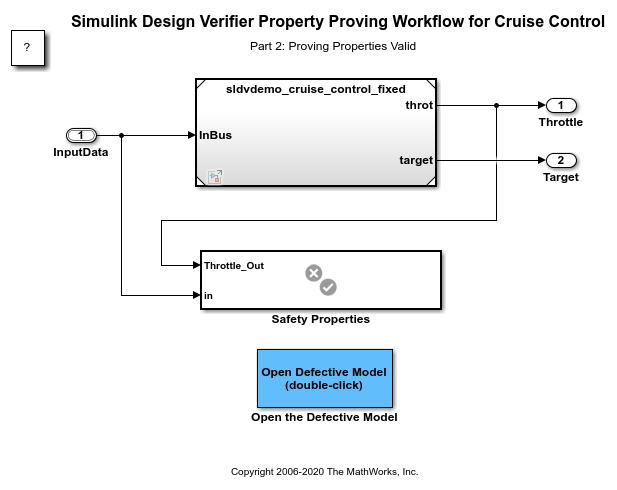
In the property proving workflow, you may be required to redesign the system and/or redefine the property and perform such iterations.
Open the referenced model sldvdemo_cruise_control_fixed and open the Controller subsystem. In this subsystem, the updated design model resets the throttle output when Active Control is active.
On the Design Verifier tab, click Prove Properties. After the analysis completes, the Results Summary window reports that the objective is valid.
See Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)