Using Parallel Computing to Accelerate Tuning
This example shows how to leverage the Parallel Computing Toolbox™ to accelerate multi-start strategies for tuning fixed-structure control systems.
Background
Both systune and looptune use local optimization methods for tuning the control architecture at hand. To mitigate the risk of ending up with a locally optimal but globally poor design, it is recommended to run several optimizations starting from different randomly generated initial points. If you have a multi-core machine or have access to distributed computing resources, you can significantly speed up this process using the Parallel Computing Toolbox.
This example shows how to parallelize the tuning of an airframe autopilot with looptune. See the example "Tuning of a Two-Loop Autopilot" for more details about this application of looptune.
Autopilot Tuning
The airframe dynamics and autopilot are modeled in Simulink.
open_system('rct_airframe1')
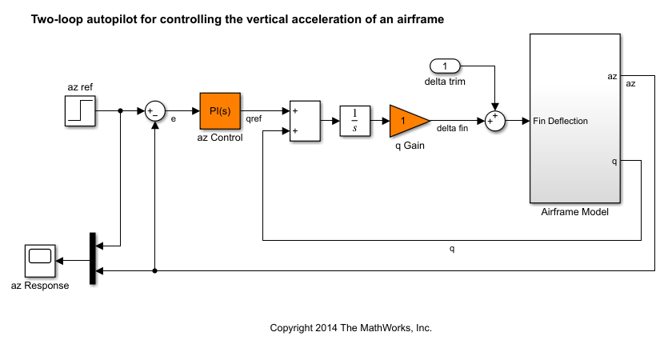
The autopilot consists of two cascaded loops whose tunable elements include two PI controller gains ("az Control" block) and one gain in the pitch-rate loop ("q Gain" block). The vertical acceleration az should track the command azref with a 1 second response time. Use slTuner to configure this tuning task (see "Tuning of a Two-Loop Autopilot" example for details):
ST0 = slTuner('rct_airframe1',{'az Control','q Gain'}); addPoint(ST0,{'az ref','delta fin','az','q'}) % Design requirements wc = [3,12]; % bandwidth TrackReq = TuningGoal.Tracking('az ref','az',1); % tracking
Parallel Tuning with LOOPTUNE
We are ready to tune the autopilot gains with looptune. To minimize the risk of getting a poor-quality local minimum, run 30 optimizations starting from 30 randomly generated values of the three gains. Configure the looptune options to enable parallel processing of these 30 runs:
rng('default') Options = looptuneOptions('RandomStart',30,'UseParallel',true);
Next call looptune to launch the tuning algorithm. The 30 runs are automatically distributed across available computing resources:
Controls = 'delta fin'; Measurements = {'az','q'}; [ST,gam,Info] = looptune(ST0,Controls,Measurements,wc,TrackReq,Options);
Starting parallel pool (parpool) using the 'local' profile ... Connected to the parallel pool (number of workers: 6). Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.075) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.04) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.06) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Peak gain = 1e+03, Iterations = 59 Final: Peak gain = 1.23, Iterations = 49 Final: Failed to enforce closed-loop stability (max Re(s) = 0.062) Final: Failed to enforce closed-loop stability (max Re(s) = 0.041) Final: Failed to enforce closed-loop stability (max Re(s) = 0.078) Final: Peak gain = 1.23, Iterations = 133 Final: Peak gain = 1.23, Iterations = 59 Final: Peak gain = 1.23, Iterations = 61 Final: Failed to enforce closed-loop stability (max Re(s) = 0.083) Final: Peak gain = 1e+03, Iterations = 61 Warning: Tuning goal "Open loop CG": Feedback configuration has fixed integrators that cannot be stabilized with available tuning parameters. Make sure these are modeling artifacts rather than physical instabilities.
Most runs return 1.23 as optimal gain value, suggesting that this local minimum has a wide region of attraction and is likely to be the global optimum. Use showBlockValue to see the corresponding gain values:
showBlockValue(ST)
AnalysisPoints_ =
D =
u1 u2 u3 u4
y1 1 0 0 0
y2 0 1 0 0
y3 0 0 1 0
y4 0 0 0 1
Name: AnalysisPoints_
Static gain.
-----------------------------------
az_Control =
1
Kp + Ki * ---
s
with Kp = 0.00165, Ki = 0.00166
Name: az_Control
Continuous-time PI controller in parallel form.
-----------------------------------
q_Gain =
D =
u1
y1 1.983
Name: q_Gain
Static gain.
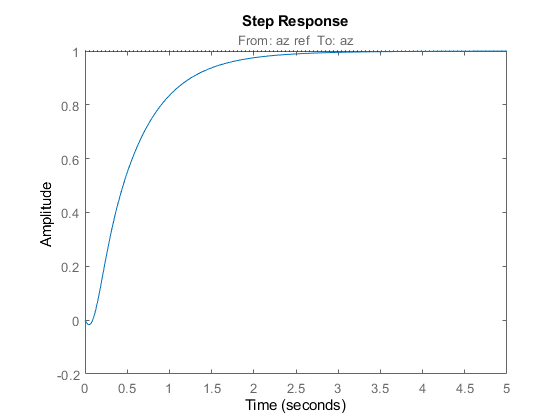
Plot the closed-loop response for this set of gains:
T = getIOTransfer(ST,'az ref','az'); step(T,5)