Sine
Implement fixed-point sine or cosine wave using lookup table approach that exploits quarter wave symmetry
Libraries:
Simulink /
Lookup Tables
Alternative Configurations of Sine Block:
Cosine
Description
The Sine and Cosine blocks implement a sine wave, cosine wave, or both in fixed point using a lookup table method that exploits quarter wave symmetry. The block can output the following functions of the input signal, depending upon what you select for the Output formula parameter:
sin(2πu)
cos(2πu)
exp(j2πu)
sin(2πu) and cos(2πu)
You define the number of lookup table points in the Number of data points
for lookup table parameter. The block implementation is most efficient
when you specify the lookup table data points to be
(2^n)+1, where n is an
integer.
Use the Output word length parameter to specify the word length of the fixed-point output data type. The fraction length of the output is the output word length minus 2.
Examples
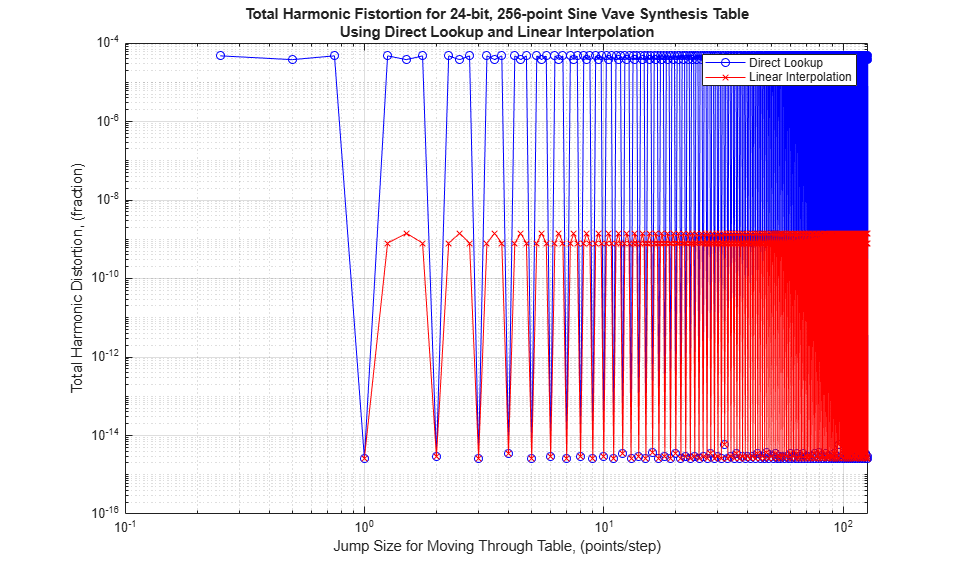
Digital Waveform Generation: Approximate a Sine Wave
Design and evaluate a sine wave data table for use in digital waveform synthesis applications in embedded systems and arbitrary waveform generation instruments.
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Alternative Configurations
Extended Capabilities
Version History
Introduced before R2006aSee Also
Sine Wave | Trigonometric Function | Sine HDL Optimized, Cosine HDL Optimized (HDL Coder)