Gain
Multiply input by constant
Libraries:
Simulink /
Commonly Used Blocks
Simulink /
Math Operations
HDL Coder /
Commonly Used Blocks
HDL Coder /
HDL Floating Point Operations
HDL Coder /
Math Operations
Description
The Gain block multiplies the input by a constant value, or gain. The input and the gain can each be a scalar, vector, or matrix.
You specify the value of gain in the Gain parameter. The Multiplication parameter lets you specify element-wise or matrix multiplication. For matrix multiplication, this parameter also lets you indicate the order of the multiplicands.
The gain is converted from doubles to the data type specified in the block mask offline using round-to-nearest and saturation. The input and gain are then multiplied, and the result is converted to the output data type using the specified rounding and overflow modes.
Examples
Open and simulate the model named SimpleGain.
mdl = "SimpleGain";
open_system(mdl)
sim(mdl);
This model represents the equation:
The Constant block provides a constant value of 2 to the Gain block.
The Gain block multiplies its input by 5.
The Display block displays the result of the multiplication.
Extended Examples
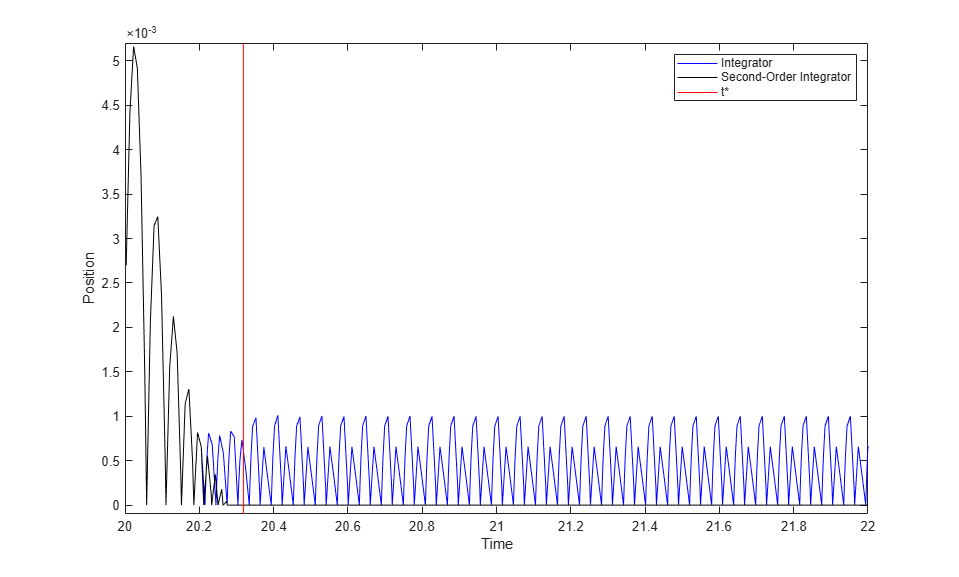
Simulation of Bouncing Ball
Uses two models of a bouncing ball to show different approaches to modeling hybrid dynamic systems with Zeno behavior. Zeno behavior is informally characterized by an infinite number of events occurring in a finite time interval for certain hybrid systems. As the ball loses energy, the ball collides with the ground in successively smaller intervals of time.

Model Stick-Slip Friction and Hard Stops in Mass-Spring-Damper System
One way you can incorporate hard stops and friction changes from stick-slip motion into a mass-spring-damper model.

Engine Timing Model with Closed Loop Control
Develop and implement a closed loop control algorithm for the open loop engine model described in Model Engine Timing Using Triggered Subsystems. In this example, the model sldemo_enginewc contains a controller that regulates engine speed using a fast throttle actuator such that changes in load torque have minimal effect. The controller is implemented using a discrete PI controller.
Ports
Input
Output
Parameters
To edit block parameters interactively, use the Property Inspector. From the Simulink® Toolstrip, on the Simulation tab, in the Prepare gallery, select Property Inspector.
Main
Specify the value by which to multiply the input. The gain can be a real or complex-valued scalar, vector, or matrix.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | Gain |
| Values: | '1' (default) | real or complex-valued scalar, vector, or matrix in
quotes |
Specify one of these multiplication modes:
Element-wise(K.*u)— Each element of the input is multiplied by each element of the gain. The block performs expansions, if necessary, so that the input and gain have the same dimensions.Matrix(K*u)— The input and gain are matrix-multiplied with the input as the second operand.Matrix(u*K)— The input and gain are matrix-multiplied with the input as the first operand.Matrix(K*u) (u vector)— The input and gain are matrix multiplied with the input as the second operand. This mode is identical toMatrix(K*u), except for how dimensions are determined.Suppose that
Kis an m-by-n matrix.Matrix(K*u)(u vector)sets the input to a vector of lengthnand the output to a vector of lengthm. In contrast,Matrix(K*u)uses propagation to determine dimensions for the input and output. For an m-by-n gain matrix, the input can propagate to an n-by-q matrix, and the output becomes an m-by-q matrix.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | Multiplication |
| Values: | 'Element-wise(K.*u)' (default) | 'Matrix(K*u)' | 'Matrix(u*K)' | 'Matrix(K*u) (u vector)' |
Specify the time interval between samples. To inherit the sample time, set this
parameter to -1. For more information, see Specify Sample Time.
Dependencies
This parameter is visible only if you set it to a value other than
-1. To learn more, see Blocks for Which Sample Time Is Not Recommended.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | SampleTime |
| Values: | "-1" (default) | scalar or vector in quotes |
Signal Attributes
Lower value of the output range that the software checks.
The software uses the minimum to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters) for some blocks.
Simulation range checking (see Specify Signal Ranges and Enable Simulation Range Checking).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Tips
Output minimum does not saturate or clip the actual output signal. Use the Saturation block instead.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | OutMin |
| Values: | '[]' (default) | scalar in quotes |
Upper value of the output range that the software checks.
The software uses the maximum value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters) for some blocks.
Simulation range checking (see Specify Signal Ranges and Enable Simulation Range Checking).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Tips
Output maximum does not saturate or clip the actual output signal. Use the Saturation block instead.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | OutMax |
| Values: | '[]' (default) | scalar in quotes |
Choose the data type for the output. The type can be inherited, specified directly, or
expressed as a data type object such as
Simulink.NumericType.
When you select an inherited option, the block exhibits these behaviors:
Inherit: Inherit via internal rule— The software chooses a data type to balance numerical accuracy, performance, and generated code size, while taking into account the properties of the embedded target hardware. If you change the embedded target settings, the data type selected by the internal rule might change. For example, if the block multiplies an input of typeint8by a gain ofint16andASIC/FPGAis specified as the targeted hardware type, the output data type issfix24. IfUnspecified (assume 32-bit Generic), in other words, a generic 32-bit microprocessor, is specified as the target hardware, the output data type isint32. If none of the word lengths provided by the target microprocessor can accommodate the output range, the software displays an error in the Diagnostic Viewer.Inherit: Keep MSB– The software chooses a data type that maintains the full range of the operation, then reduces the precision of the output to a size appropriate for the embedded target hardware.Tip
For more efficient generated code, clear Saturate on integer overflow.
This rule never produces overflows.
Inherit: Match scaling– The software chooses a data type whose scaling matches the scaling of the input types. If the full range of the type does not fit on the embedded target hardware, the range is reduced yielding a type appropriate for the embedded target hardware. This rule can produce overflows.It is not always possible for the software to optimize code efficiency and numerical accuracy at the same time. If these internal rules do not meet your specific needs for numerical accuracy or performance, use one of the following options:
Specify the output data type explicitly.
Use the simple choice of
Inherit: Same as input.Explicitly specify a default data type such as
fixdt(1,32,16)and then use the Fixed-Point Tool to propose data types for your model. For more information, seefxptdlg(Fixed-Point Designer).To specify your own inheritance rule, use
Inherit: Inherit via back propagationand use a Data Type Propagation block. Examples of how to use this block are available in the Signal Attributes library Data Type Propagation Examples block.
Inherit: Inherit via back propagation— Use the data type of the driving block.Inherit: Same as input— Use the data type of the input signal.
Dependencies
When the input is a floating-point data type smaller than single precision, the
Inherit: Inherit via internal ruleoutput data type depends on the setting of the Inherit floating-point output type smaller than single precision configuration parameter. Data types are smaller than single precision when the number of bits needed to encode the data type is less than the 32 bits needed to encode the single-precision data type. For example,halfandint16are smaller than single precision.If a fixed-point data type is selected while using
Inherit: Keep MSB,Inherit: Keep LSB, orInherit: Match scaling, a Fixed-Point Designer™ license is checked out. Fixed-point types may also result when you use a combination of internal rules. To minimize instances of the Gain block selecting fixed-point types when you useInherit:Inherit via internal rule, set the GainParamInheritBuiltInType parameter to 'on'. For more information, see Gain parameters inherit a built-in integer type that is lossless.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | OutDataTypeStr |
| Values: | 'Inherit: Inherit via internal
rule' (default) | 'Inherit: Keep MSB' | 'Inherit: Match scaling' | 'Inherit: Inherit via back
propagation' | 'Inherit: Same as input' | 'double' | 'single' | 'half' | 'int8' | 'uint8' | 'int16' | 'uint16' | 'int32' | 'uint32' | 'int64' | 'uint64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' | 'fixdt(1,16,2^0,0)' | '<data type expression>' |
Select this parameter to prevent the fixed-point tools from overriding the Output data type you specify on the block. For more information, see Use Lock Output Data Type Setting (Fixed-Point Designer).
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | LockScale |
| Values: | 'off' (default) | 'on' |
Specify the rounding mode for fixed-point operations. For more information, see Rounding Modes (Fixed-Point Designer).
Block parameters always round to the nearest representable value. To control the rounding of a block parameter, enter an expression using a MATLAB® rounding function into the mask field.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | RndMeth |
| Values: | 'Floor' (default) | 'Ceiling' | 'Convergent' | 'Nearest' | 'Round' | 'Simplest' | 'Zero' |
Specify whether overflows saturate or wrap.
on— Overflows saturate to either the minimum or maximum value that the data type can represent.off— Overflows wrap to the appropriate value that the data type can represent.
For example, the maximum value that the signed 8-bit integer int8
can represent is 127. Any block operation result greater than this maximum value causes
overflow of the 8-bit integer.
With this parameter selected, the block output saturates at 127. Similarly, the block output saturates at a minimum output value of -128.
With this parameter cleared, the software interprets the overflow-causing value as
int8, which can produce an unintended result. For example, a block result of 130 (binary 1000 0010) expressed asint8is -126.
Tips
Consider selecting this parameter when your model has a possible overflow and you want explicit saturation protection in the generated code.
Consider clearing this parameter when you want to optimize efficiency of your generated code. Clearing this parameter also helps you to avoid overspecifying how a block handles out-of-range signals. For more information, see Troubleshoot Signal Range Errors.
When you select this parameter, saturation applies to every internal operation on the block, not just the output or result.
In general, the code generation process can detect when overflow is not possible. In this case, the code generator does not produce saturation code.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | SaturateOnIntegerOverflow |
| Values: | 'off' (default) | 'on' |
Select the category of data to specify.
Inherit— Inheritance rules for data types. SelectingInheritenables a second menu/text box to the right where you can select the inheritance mode.Built in— Built-in data types. SelectingBuilt inenables a second menu/text box to the right where you can select a built-in data type.Fixed point— Fixed-point data types. SelectingFixed pointenables additional parameters that you can use to specify a fixed-point data type.Expression— Expressions that evaluate to data types. SelectingExpressionenables a second menu/text box to the right, where you can enter the expression.
For more information, see Specify Data Types Using Data Type Assistant.
Dependencies
To enable this parameter, click the Show data type assistant
button ![]() .
.
Select the data type override mode for this signal.
When you select
Inherit, Simulink inherits the data type override setting from its context, that is, from the block,Simulink.Signalobject or Stateflow® chart in Simulink that is using the signal.When you select
Off, Simulink ignores the data type override setting of its context and uses the fixed-point data type specified for the signal.
For more information, see Specify Data Types Using Data Type Assistant in the Simulink documentation.
Dependencies
To enable this parameter, set Mode to Built
in or Fixed point.
Tips
The ability to turn off data type override for an individual data type provides greater control over the data types in your model when you apply data type override. For example, you can use this option to ensure that data types meet the requirements of downstream blocks regardless of the data type override setting.
Specify whether the fixed-point data is signed or unsigned. Signed data can represent positive and negative values, but unsigned data represents positive values only.
Signed, specifies the fixed-point data as signed.Unsigned, specifies the fixed-point data as unsigned.
For more information, see Specify Data Types Using Data Type Assistant.
Dependencies
To enable this parameter, set the Mode to Fixed
point.
Specify the bit size of the word that holds the quantized integer. For more information, see Specifying a Fixed-Point Data Type.
Dependencies
To enable this parameter, set Mode to
Fixed point.
Specify the method for scaling your fixed-point data to avoid overflow conditions and minimize quantization errors. For more information, see Specifying a Fixed-Point Data Type.
Dependencies
To enable this parameter, set Mode to
Fixed point.
Specify slope for the fixed-point data type. For more information, see Specifying a Fixed-Point Data Type.
Dependencies
To enable this parameter, set Scaling to
Slope and bias.
Specify bias for the fixed-point data type as any real number. For more information, see Specifying a Fixed-Point Data Type.
Dependencies
To enable this parameter, set Scaling to
Slope and bias.
Specify fraction length for fixed-point data type as a positive or negative integer. For more information, see Specifying a Fixed-Point Data Type.
Dependencies
To enable this parameter, set Scaling to
Binary point.
Parameter Attributes
Specify the minimum value of gain. The default value is []
(unspecified). The software uses this value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters)
Automatic scaling of fixed-point data types
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | ParamMin |
| Values: | '[]' (default) | scalar in quotes |
Specify the maximum value of gain. The default value is []
(unspecified). The software uses this value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters)
Automatic scaling of fixed-point data types
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | ParamMax |
| Values: | '[]' (default) | scalar in quotes |
Specify the data type of the Gain parameter.
Setting Parameter data type to
Inherit: Inherit via internal rule lets
the Gain block select a data type based on an internal
heuristic that looks at the current gain value and provides a full
precision data type to represent the current gain value. When you update
the diagram, the software deduces a data type to fit the gain value
3 with high precision and no range loss. For
example, with this heuristic, if the specified gain value is
3, the Gain block deduces a
selected data type of sfix32_En29. Consequently, this
deduced data type cannot hold values greater than 4.
During simulation, if you tune the gain value to 6,
an overflow occurs in the selected data type and the behavior is
unexpected.
While tuning a parameter with this Parameter data type setting, specify the Parameter Minimum and Parameter Maximum parameters. These settings tell the software about the range of values you want during the simulation and allows the software to provide a full precision data type with sufficient range to allow safe tuning of the gain value within the specified range.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | ParamDataTypeStr |
| Values: | 'Inherit: Inherit via internal
rule' (default) | 'Inherit: Same as input' | 'Inherit: Inherit from 'Gain'' | 'double' | 'single' | 'half' | 'int8' | 'uint8' | 'int16' | 'uint16' | 'int32' | 'uint32' | 'int64' | 'uint64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' | 'fixdt(1,16,2^0,0)' | '<data type expression>' |
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|