S-Function Examples
These examples show you how to work with a variety of S-functions or programs that use S-functions, including C/C++ S-functions, Fortran S-functions, S-function Builder, Level 2 MATLAB® S-functions, and Blockset Designer. Each section explains how to open the files and what is in them. These are good places to continue to develop an understanding of S-functions after learning the basics. These do not represent all the examples available for S-functions, but a relevant subsection.
Access S-Function Examples
Most of the S-function examples are run through sfundemos.
This example library contains S-function models and is grouped by coding type, such
as C S-functions or C++ S-functions.
To run an example from sfundemos:
In the MATLAB Command Window, enter
sfundemos.The S-function example library opens.
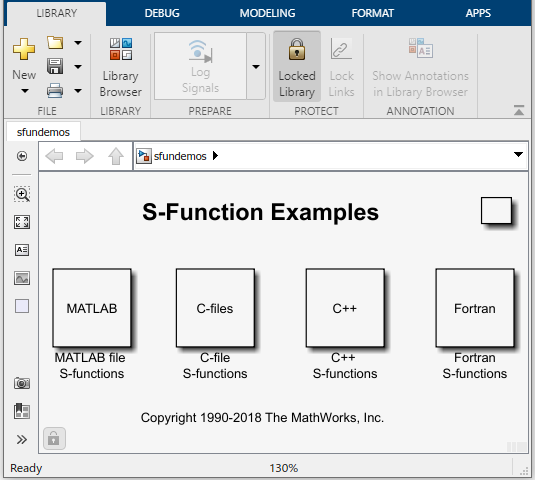
Each block represents a category of S-function examples.
Double-click a category to display the examples that it includes. For example, click C-files.
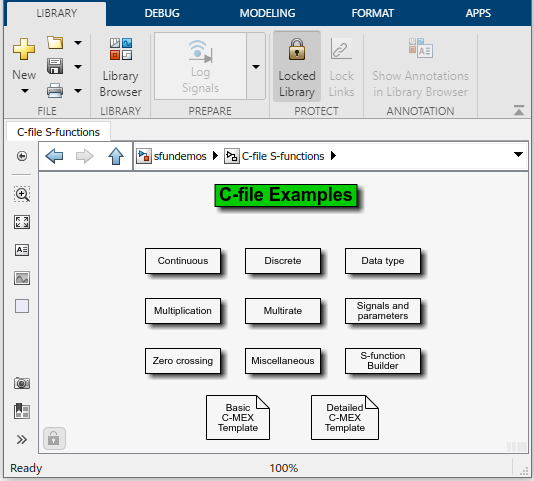
Double-click a block to open and run the example that it represents.
It might be helpful to examine some sample S-functions as you read the next chapters. Code for the examples is stored in the following folder under the MATLAB root folder.
MATLAB code |
|
C, C++, and Fortran code |
|
Level-2 MATLAB S-Function Examples
The
matlabroot/toolbox/simulink/sfuntemplates
| Filename | Model Name | Description |
|---|---|---|
msfcn_dsc.m | msfcndemo_sfundsc1 | Implement an S-function with an inherited sample time. |
msfcn_limintm.m | msfcndemo_limintm | Implement a continuous limited integrator where the output is bounded by lower and upper bounds and includes initial conditions. |
msfcn_multirate.m | msfcndemo_multirate | Implement a multirate system. |
msfcn_times_two.m | msfcndemo_timestwo | Implement an S-function that doubles its input. |
msfcn_unit_delay.m | msfcndemo_sfundsc2 | Implement a unit delay. |
msfcn_varpulse.m | msfcndemo_varpulse | Implement a variable pulse width generator by calling the
set_param function within a Level-2
MATLAB S-function. Also demonstrates how to use custom set
and get methods for the block operating point. |
msfcn_vs.m | msfcndemo_vsfunc | Implement a variable sample time block in which the first input is delayed by an amount of time determined by the second input. |
C S-Function Examples
The
matlabroot/toolbox/simulink/sfuntemplates/src
| Filename | Model Name | Description |
|---|---|---|
csfunc.c | sfcndemo_csfunc | Implement a continuous system. |
dlimintc.c | No model available | Implement a discrete-time limited integrator. |
dsfunc.c | sfcndemo_dsfunc | Implement a discrete system. |
limintc.c | No model available | Implement a limited integrator. |
mixedm.c | sfcndemo_mixedm | Implement a hybrid dynamic system consisting of a continuous integrator (1/s) in series with a unit delay (1/z). |
mixedmex.c | sfcndemo_mixedmex | Implement a hybrid dynamic system with a single output and two inputs. |
slexQuantizeSFcn.c | sfcndemo_sfun_quantize | Implement a vectorized quantizer. Quantizes the input into steps
as specified by the quantization interval parameter,
q. |
sdotproduct.c | sfcndemo_sdotproduct | Compute dot product (multiply-accumulate) of two real or complex vectors. |
sfbuilder_bususage.c | sfbuilder_bususage | Access S-Function Builder with a bus input and output. |
sfbuilder_movingAverage.c | sfbuilder_movingAverage | Implement simple time window moving average using Start and Terminate. |
sftable2.c | sfcndemo_sftable2 | Implement a two-dimensional table lookup. |
sfun_atol.c | sfcndemo_sfun_atol | Set different absolute tolerances for each continuous state. |
sfun_cplx.c | sfcndemo_cplx | Add complex data for an S-function with one input port and one parameter. |
sfun_directlook.c | No model available | Implement a direct 1-D lookup. |
sfun_dtype_io.c | sfcndemo_dtype_io | Implement an S-function that uses Simulink® data types for inputs and outputs. |
sfun_dtype_param.c | sfcndemo_dtype_param | Implement an S-function that uses Simulink data types for parameters. |
sfun_dynsize.c | sfcndemo_sfun_dynsize | Implements dynamically-sized outputs. |
sfun_errhdl.c | sfcndemo_sfun_errhdl | Check parameters using the mdlCheckParameters
S-function routine. |
sfun_fcncall.c | sfcndemo_sfun_fcncall | Execute function-call subsystems on the first and second output elements. |
sfun_multiport.c | sfcndemo_sfun_multiport | Configure multiple input and output ports. |
sfun_manswitch_mode.c | No model available | Implement a manual switch. |
sfun_matadd.c | sfcndemo_matadd | Add matrices in an S-function with one input port, one output port, and one parameter. |
sfun_multirate.c | sfcndemo_sfun_multirate | Demonstrate how to specify port-based sample times. |
sfun_port_constant.c | sfcndemo_port_constant | Demonstrate how to specify constant port-based sample times. |
sfun_port_triggered.c | sfcndemo_port_triggered | Demonstrate how to use port-based sample times in a triggered subsystem. |
sfun_runtime1.c | sfcndemo_runtime | Implement run-time parameters for all tunable parameters. |
sfun_runtime2.c | sfcndemo_runtime | Register individual run-time parameters. |
sfun_runtime3.c | sfcndemo_runtime | Register dialog parameters as run-time parameters. |
sfun_runtime4.c | sfcndemo_runtime | Implement run-time parameters as a function of multiple dialog parameters. |
sfun_zc.c | sfcndemo_sfun_zc | Demonstrate use of nonsampled zero crossings to implement
abs(u). This S-function is designed to be
used with a variable-step solver. |
sfun_zc_sat.c | sfcndemo_sfun_zc_sat | Demonstrate zero crossings with saturation. |
sfun_zc_cstate_sat.c | sfcndemo_sfun_zc_cstate_sat | Implement a continuous integrator with saturation limits and zero-crossing detection. |
sfun_integrator_localsolver.c | sfcndemo_sfun_localsolver | Demonstrate a continuous integrator where the continuous states are solved using a separate local solver instead of that used by the model. |
sfun_angle_events.c | sfcndemo_angle_events | Implement a method for robust and efficient detection of a rotating body crossing specified angles. |
sfun_angle_events.c | No model available | Demonstrate angle detection and incorporate Stateflow® to schedule function calls. |
sfunmem.c | sfcndemo_sfunmem | Implement a one-integration-step delay and hold memory function. |
simomex.c
| sfcndemo_simomex | Implement a single-input, two-output state-space dynamic system described by the state-space equations: dx/dt = Ax + Bu y = Cx + Du x is the state vector,
u is vector of inputs, and
y is the vector of outputs.
|
stspace.c
| sfcndemo_stspace | Implement a set of state-space equations. You can turn this into a new block by using the S-Function block and mask facility. This example MEX file performs the same function as the built-in State-Space block. This is an example of a MEX file where the number of inputs, outputs, and states is dependent on the parameters passed in from the workspace. |
stvctf.c
| sfcndemo_stvctf | Implement a continuous-time transfer function whose transfer function polynomials are passed in via the input vector. This is useful for continuous time adaptive control applications. |
stvdtf.c | sfcndemo_stvdtf | Implement a discrete-time transfer function whose transfer function polynomials are passed in via the input vector. This is useful for discrete-time adaptive control applications. |
stvmgain.c | sfcndemo_stvmgain | Implement a time-varying matrix gain. |
table3.c | No model available | Implement a 3-D lookup table. |
timestwo.c | sfcndemo_timestwo | Implement a C MEX S-function that doubles its input. |
vdlmintc.c | No model available | Implement a discrete-time vectorized limited integrator. |
vdpmex.c | sfcndemo_vdpmex | Implement the Van der Pol equation. |
vlimintc.c
| No model available | Implement a vectorized limited integrator. |
vsfunc.c | sfcndemo_vsfunc | Illustrate how to create a variable sample time block. This block implements a variable-step delay in which the first input is delayed by an amount of time determined by the second input. |
sfun_pwm.c | sfcndemo_pwm | Illustrate how to create a controllable sample time block. |
sfun_d2c | sfcndemo_d2c | Illustrate how to convert a discrete input signal into a smooth continuous output signal |
sfun_pulse_delay.c | sfcndemo_vco | Illustrate how to implement an algorithm to efficiently delay a discrete valued input signal by a variable amount using variable sample time. |
Fortran S-Function Examples
The following table lists sample Fortran® S-functions available in the
matlabroot/toolbox/simulink/sfuntemplates/src
| Filename | Model Name | Description |
|---|---|---|
sfun_atmos.csfun_atmos_sub.F | sfcndemo_atmos | Calculate the 1976 standard atmosphere to 86 km using a Fortran subroutine. |
C++ S-Function Examples
The following table lists sample C++ S-functions available in the
matlabroot/toolbox/simulink/sfuntemplates/src
| Filename | Model Name | Description |
|---|---|---|
sfun_counter_cpp.cpp | sfcndemo_counter_cpp | Store a C++ object in the pointers vector
PWork. |
sfbuilder_permute.cpp | sfbuilder_permutation | Implement permutation by calling external C++ classes using Start and Terminate. |
sfbuilder_linfilt.cpp | sfbuilder_upsampling | Implement linear filtering with C++ STL algorithms for the upsampling of a sine wave. |
Organizing S-Function in a Project
The following example shows how to arrange S-function artifacts into a project. This is accomplished using the Blockset Designer feature. For more on Blockset Designer, see Create a Blockset Project.
| Filename | Description |
|---|---|
slexBlocksetDesignerExample | Organize S-function artifacts into a single project using Blockset Designer. |
See Also
Level-2 MATLAB S-Function | S-Function Builder | S-Function | MATLAB Function