Longitudinal Vehicle
Libraries:
Simscape /
Driveline /
Tires & Vehicles
Description
The Longitudinal Vehicle block represents an abstract vehicle confined to longitudinal motion. You can parameterize an arbitrary vehicle or choose from predefined parameterizations. The block includes optional non-slipping tires and ideal brakes.
You can use this block as a simpler alternative to the Vehicle Body block. The Longitudinal Vehicle block requires less information to parameterize and is more suitable for a nascent design.
The block equations use these variables:
m is the Vehicle mass parameter.
vx is the longitudinal velocity output at the VehSpd port.
Fx is the sum of longitudinal forces.
rtire is the radius of the tire and is equivalent to the Tire rolling radius parameter.
Fdrive, Fbrake, and Fresist are the driving force of the vehicle, the braking force, and the vehicle resistance force, respectively. Fbrake and Fresist oppose the driving motion of the vehicle in the force balance equation.
τaxle is the torque at the axle.
FB is the brake force input from the Brake port.
ωaxle is the rotational speed of the axle.
ω1 is an arbitrary constant that adjusts the speed range in which the block suppresses Fbrake.
Ftire is the tire rolling resistance.
Fair is the drag force due to air resistance.
θ is the road incline angle input from either the Angle, NG, or PG port.
v1 is an arbitrary constant that adjusts the speed range in which the block suppresses Fair and Ftire.
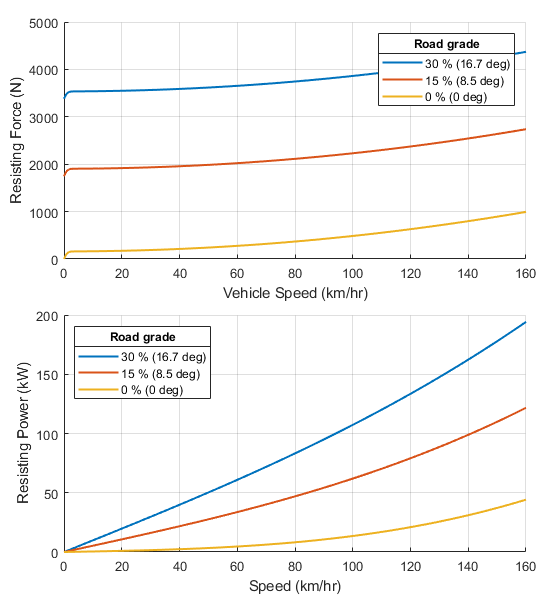
You can access a visualization of the vehicle properties by clicking the vehicle properties hyperlink in the source code. The figure shows the default block properties, where the first plot is the resisting force as a function of vehicle speed for different road grades, and the second plot is the resisting power for a given speed at different road grades.
Parameterizations
For all settings of the Parameterization type parameter, the block calculates the equations of longitudinal vehicle speed as
where
and
The block treats the drive direction as positive in the force balance equation. It solves this equation using these substitutions:
You can set Parameterization type to
Road-load or Regular parameter
set to simulate an arbitrary vehicle. You can also choose from
three predefined parameterizations, Typical small car,
Typical medium-sized car, and Typical
large sports utility vehicle.
When you set Parameterization type to Regular parameter
set, you can specify the Tire rolling
coefficient, Air drag coefficient, and
Vehicle frontal area parameters of the vehicle, which
the block converts to road-load coefficients.
The block computes the tire rolling resistance as
where CR is the Tire rolling coefficient parameter.
The block computes the air resistance as
where CD is the Air drag coefficient parameter, Af is the Vehicle frontal area parameter in m2, and ρA is the density of dry air. The block assumes ρA = 1.184 kg/m3 at 1 atmosphere.
When you set Parameterization type to
Road-load, the block applies the standard
road-load formulation and computes the core physics as:
where ARL, BRL, and CRL are the road-load coefficients.
Note
Each road-load coefficient is specific to its associated units of vx. There are no standard units for these coefficients; however, some texts may assume certain units. Select the correct units when you parameterize these coefficients.
The block uses these coefficients to solve for the values in the core physics as
and
Here, vw is the wind speed from the Wind port.
You can set Parameterization type to three predefined
parameterizations: Typical small car,
Typical medium-sized car, and
Typical large sports utility vehicle. The values
represent industry averages rather than specific vehicles. You can start with
one of these predefined parameterizations and later adjust these values by
setting Parameterization type to
Road-load or Regular parameter
set and using the pertinent information from the tables.
Regular parameter set
| Parameterization type | Vehicle mass | Tire rolling radius | Tire rolling coefficient | Drag coefficient | Frontal Area |
|---|---|---|---|---|---|
Typical small car |
|
|
|
| 0.9*1.65*1.45 = |
Typical medium-sized
car |
|
|
|
| 0.9*1.75*1.5 = |
Typical large sports utility
vehicle |
|
|
|
| 0.9*1.88*1.85 = |
Note that each predefined parameterization assumes B = 0 for the road-load method.
Road-load
| Parameterization type | A | B | C |
|---|---|---|---|
Typical small car |
|
|
|
Typical medium-sized
car |
|
|
|
Typical large sports utility
vehicle |
|
|
|
Where the Vehicle frontal area equation corresponds to 0.9·vehicle width·vehicle height.
Variables
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see Modify Nominal Values for a Block Variable.
Ports
Input
Output
Conserving
Parameters
References
[1] Eriksson, Lars, and Lars Nielsen. Modeling and Control of Engines and Drivelines: Eriksson/Modeling and Control of Engines and Drivelines. Chichester, UK: John Wiley & Sons, Ltd, 2014. https://doi.org/10.1002/9781118536186.
[2] Heywood, John B. Internal Combustion Engine Fundamentals. Second edition. New York: McGraw-Hill Education, 2018.
[3] Society of Automotive Engineers: Light Duty Vehicle Performance and Economy Measure Committee. “Chassis Dynamometer Simulation of Road Load Using Coastdown Techniques. SAE J2264” SAE International. 2014. https://doi.org/10.4271/J2264_201401.
[4] Society of Automotive Engineers: Light Duty Vehicle Performance and Economy Measure Committee. “Road Load Measurement and Dynamometer Simulation Using Coastdown Techniques. SAE J1263” SAE International. 2010. https://doi.org/10.4271/J1263_201003.
Extended Capabilities
Version History
Introduced in R2021bSee Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)