Follow Task Space Trajectory in Simulink
This example shows how to use a Task Space Motion Model to follow a task space trajectory.
Load Robot and Simulink Model
This example uses a Kinova Gen3 manipulator robot. Load the model using loadrobot.
[gen3,metadata] = loadrobot("kinovaGen3",'DataFormat','column'); initialConfig = homeConfiguration(gen3); targetPosition = trvec2tform([0.6 -.1 0.5])
targetPosition = 4×4
1.0000 0 0 0.6000
0 1.0000 0 -0.1000
0 0 1.0000 0.5000
0 0 0 1.0000
Open the Simulink model.
open_system("followTaskSpaceTrajectoryModel.slx")Trajectory Generation
The Transform Trajectory block creates a trajectory between the initial homogeneous transform matrix of the end effector of the Gen3, and the target position over a 3 second time interval.

Follow Trajectory
The Joint Space Motion Model uses a RigidBodyTree, gen3, to calculate the joint positions to follow the trajectory. The joint positions are converted to homogeneous transform matrices and then the converted to a translation vector so that it is easier to visualize.
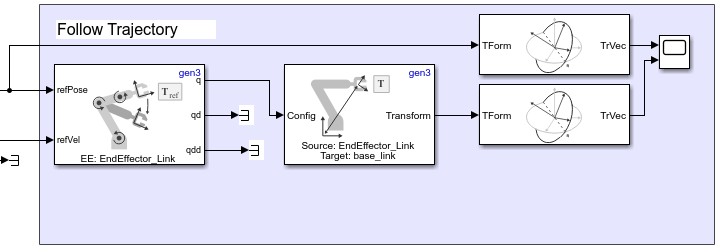
Visualize Results
The joint target positions and the calculated joint values from the Task Space Motion Model connect to a Scope block. Using the legend, you can select a smaller set of signals to compare with better clarity. Observe that the x, y, and z positions of the end effector match closely with the x, y, and z positions of the trajectory to the target position.
