Build a Robot Step by Step
This example goes through the process of building a robot step by step, showing you the different robot components and how functions are called to build it. Code sections are shown, but actual values for dimensions and transformations depend on your robot.
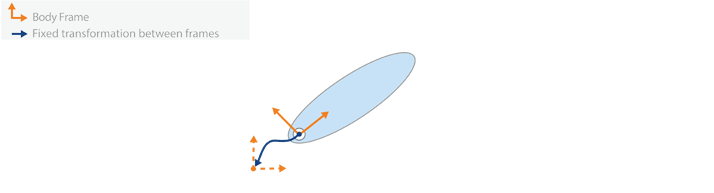
Create a rigid body object.
body1 = rigidBody('body1');
Create a joint and assign it to the rigid body. Define the home position property of the joint,
HomePosition. Set the joint-to-parent transform using a homogeneous transformation,tform. Use thetrvec2tformfunction to convert from a translation vector to a homogenous transformation.ChildToJointTransformis set to an identity matrix.jnt1 = rigidBodyJoint('jnt1','revolute'); jnt1.HomePosition = pi/4; tform = trvec2tform([0.25, 0.25, 0]); % User defined setFixedTransform(jnt1,tform); body1.Joint = jnt1;
Create a rigid body tree. This tree is initialized with a base coordinate frame to attach bodies to.
robot = rigidBodyTree;
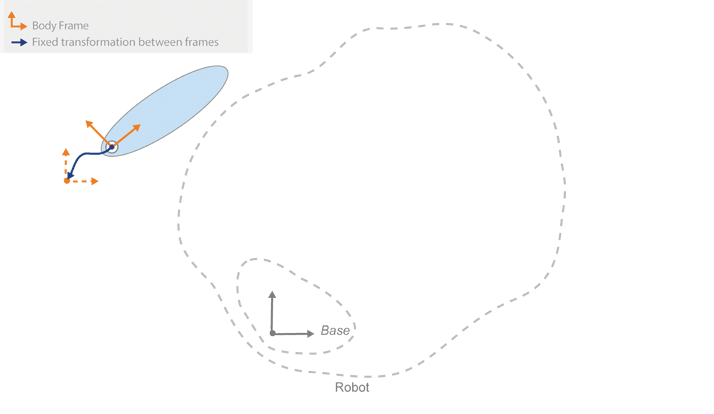
Add the first body to the tree. Specify that you are attaching it to the base of the tree. The fixed transform defined previously is from the base (parent) to the first body.
addBody(robot,body1,'base')
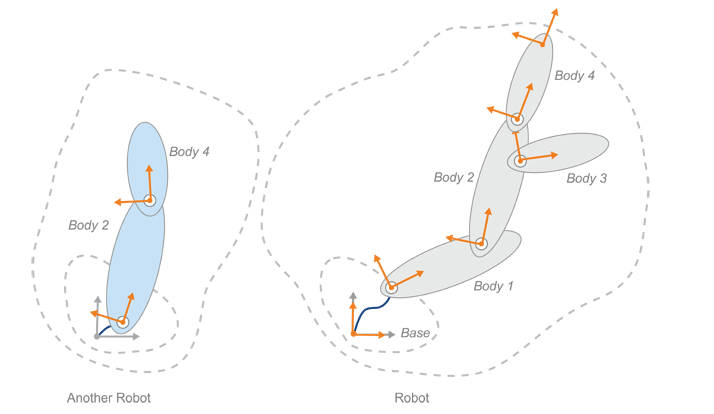
Create a second body. Define properties of this body and attach it to the first rigid body. Define the transformation relative to the previous body frame.
body2 = rigidBody('body2'); jnt2 = rigidBodyJoint('jnt2','revolute'); jnt2.HomePosition = pi/6; % User defined tform2 = trvec2tform([1, 0, 0]); % User defined setFixedTransform(jnt2,tform2); body2.Joint = jnt2; addBody(robot,body2,'body1'); % Add body2 to body1

Add other bodies. Attach body 3 and 4 to body 2.
body3 = rigidBody('body3'); body4 = rigidBody('body4'); jnt3 = rigidBodyJoint('jnt3','revolute'); jnt4 = rigidBodyJoint('jnt4','revolute'); tform3 = trvec2tform([0.6, -0.1, 0])*eul2tform([-pi/2, 0, 0]); % User defined tform4 = trvec2tform([1, 0, 0]); % User defined setFixedTransform(jnt3,tform3); setFixedTransform(jnt4,tform4); jnt3.HomePosition = pi/4; % User defined body3.Joint = jnt3 body4.Joint = jnt4 addBody(robot,body3,'body2'); % Add body3 to body2 addBody(robot,body4,'body2'); % Add body4 to body2

If you have a specific end effector that you care about for control, define it as a rigid body with a fixed joint. For this robot, add an end effector to
body4so that you can get transformations for it.bodyEndEffector = rigidBody('endeffector'); tform5 = trvec2tform([0.5, 0, 0]); % User defined setFixedTransform(bodyEndEffector.Joint,tform5); addBody(robot,bodyEndEffector,'body4');
Now that you have created your robot, you can generate robot configurations. With a given configuration, you can also get a transformation between two body frames using
getTransform. Get a transformation from the end effector to the base.config = randomConfiguration(robot) tform = getTransform(robot,config,'endeffector','base')
config = 1×2 struct array with fields: JointName JointPosition tform = -0.5484 0.8362 0 0 -0.8362 -0.5484 0 0 0 0 1.0000 0 0 0 0 1.0000
Note
This transform is specific to the dimensions specified in this example. Values for your robot vary depending on the transformations you define.
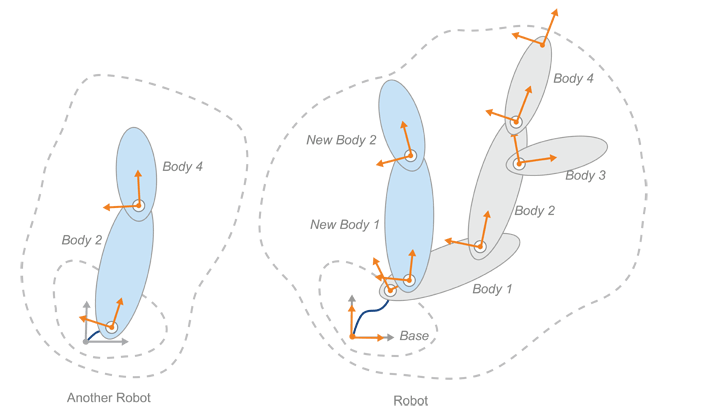
You can create a subtree from your existing robot or other robot models by using
subtree. Specify the body name to use as the base for the new subtree. You can modify this subtree by adding, changing, or removing bodies.newArm = subtree(robot,'body2'); removeBody(newArm,'body3'); removeBody(newArm,'endeffector')
You can also add these subtrees to the robot. Adding a subtree is similar to adding a body. The specified body name acts as a base for attachment, and all transformations on the subtree are relative to that body frame. Before you add the subtree, you must ensure all the names of bodies and joints are unique. Create copies of the bodies and joints, rename them, and replace them on the subtree. Call
addSubtreeto attach the subtree to a specified body.newBody1 = copy(getBody(newArm,'body2')); newBody2 = copy(getBody(newArm,'body4')); newBody1.Name = 'newBody1'; newBody2.Name = 'newBody2'; newBody1.Joint = rigidBodyJoint('newJnt1','revolute'); newBody2.Joint = rigidBodyJoint('newJnt2','revolute'); tformTree = trvec2tform([0.2, 0, 0]); % User defined setFixedTransform(newBody1.Joint,tformTree); replaceBody(newArm,'body2',newBody1); replaceBody(newArm,'body4',newBody2); addSubtree(robot,'body1',newArm);
Finally, you can use
showdetailsto look at the robot you built. Verify that the joint types are correct.showdetails(robot)
Idx Body Name Joint Name Joint Type Parent Name(Idx) Children Name(s) --- --------- ---------- ---------- ---------------- ---------------- 1 body1 jnt1 revolute base(0) body2(2) newBody1(6) 2 body2 jnt2 revolute body1(1) body3(3) body4(4) 3 body3 jnt3 revolute body2(2) 4 body4 jnt4 revolute body2(2) endeffector(5) 5 endeffector endeffector_jnt fixed body4(4) 6 newBody1 newJnt1 revolute body1(1) newBody2(7) 7 newBody2 newJnt2 revolute newBody1(6) --------------------
See Also
rigidBodyTree | inverseKinematics