Manipulator Planning
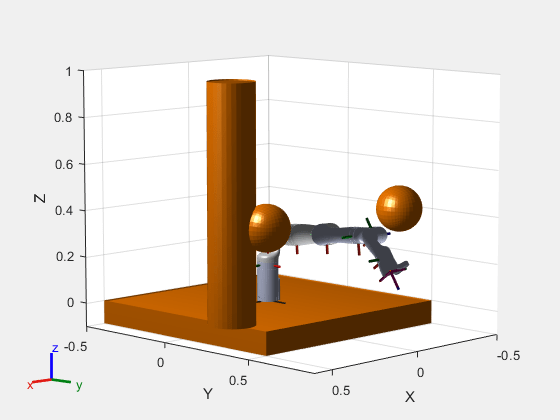
Manipulator motion planning involves planning paths in high-dimensional space
based on the degree-of-freedom (DOF) of your robot and the kinematic constraints
of the robot model. Kinematic constraints for the robot model are specified as a
rigidBodyTree object. Use
manipulatorRRT to plan paths in the joint space using the rapidly
exploring random tree (RRT) algorithm. Use manipulatorCHOMP to plan and optimize smooth, collision-free
trajectories using covariant Hamiltonian optimization for motion planning
(CHOMP) algorithm.
Functions
Topics
- Pick and Place Using RRT for Manipulators
Using manipulators to pick and place objects in an environment may require path planning algorithms like the rapidly-exploring random tree planner.
- Pick-and-Place Workflow Using RRT Planner and Stateflow for MATLAB
This example shows how to setup an end-to-end pick-and-place workflow for a robotic manipulator like the Kinova® Gen3.
- Pick-and-Place Workflow in Gazebo Using Point-Cloud Processing and RRT Path Planning
Set up an end-to-end, pick-and-place workflow for a robotic manipulator like the KINOVA® Gen3.
- Plan Paths with End-Effector Constraints Using State Spaces for Manipulators
Plan a manipulator robot path using sampling-based planners like the rapidly-exploring random trees (RRT) algorithm.
Featured Examples




You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)