Range-Angle Response
Obtain range-angle response map for array
Libraries:
Phased Array System Toolbox /
Detection
Description
The Range-Angle Response block computes the range-angle map of an input signal. The output response is a matrix or a three-dimensional array whose rows represent range gates and columns represent angles. Pages represent
Ports
Input
Output
Parameters
Main Tab
Measurement mode, specified as Monostatic or Bistatic. When set to Monostatic, the range measurement is the monostatic range. When set to Bistatic, the range measurement is the bistatic range.
Example: Bistatic
Data Types: char | string
Range processing method, specified as Matched
filter or FFT.
Matched filter— The object match-filters the incoming signal. This approach is commonly used for pulsed signals, where the matched filter is the time reverse of the transmitted signal.FFT— The object applies an FFT to the input signal. This approach is commonly used for chirped signals such as FMCW and linear FM pulsed signals.
Data Types: char
Linear FM sweep slope, specified as a scalar. The fast-time dimension of
the X input port must correspond to sweeps having this
slope.
Example: 1.5e9
Dependencies
To enable this parameter, set the Range processing
method parameter to
FFT.
Data Types: double
Option to enable dechirping of input signals, specified as
on or off. Not selecting this
check box indicates that the input signal is already dechirped and no
dechirp operation is necessary. Select this check box when the input signal
requires dechirping.
Dependencies
To enable this parameter, set the Range processing
method parameter to
FFT.
Data Types: Boolean
Source of the FFT length used for the range processing of dechirped
signals, specified as Auto or
Property.
Auto— The FFT length equals the length of the fast-time dimension of the input data cube.Property— Specify the FFT length by using the FFT length in range processing parameter.
Dependencies
To enable this parameter, set the Range processing
method parameter to
FFT.
Data Types: char
FFT length used for range processing, specified as a positive integer.
Dependencies
To enable this parameter, set the Range processing
method parameter to FFT and
the Source of FFT length in range processing
parameter to Property.
Data Types: double
FFT weighting window for range processing, specified as
None, Hamming,
Chebyshev, Hann,
Kaiser, or
Taylor.
If you set this parameter to Taylor, the
generated Taylor window has four nearly constant sidelobes next to the
mainlobe.
Dependencies
To enable this parameter, set the Range processing
method parameter to
FFT.
Data Types: char
Sidelobe attenuation for range processing, specified as a positive scalar. This attenuation applies only to Kaiser, Chebyshev, or Taylor windows. Units are in dB.
Dependencies
To enable this parameter, set the Range processing
method parameter to FFT and
the Range processing window parameter to
Kaiser,
Chebyshev, or
Kaiser.
Set reference range at center of range grid, specified as
on or off. Selecting this check
box enables you to set the reference range at the center of the range grid.
Otherwise, the reference range corresponds to the beginning of the range
grid.
Dependencies
To enable this parameter, set the Range processing
method to FFT.
Data Types: Boolean
Reference range of the range grid, specified as a nonnegative scalar.
If you set the Range processing method parameter to
'Matched filter', the reference range is set to the start of the range grid.If you set the Range processing method parameter to
FFT, the reference range is determined by the Set reference range at center parameter.When you select the Set reference range at center check box, the reference range is set to the center of the range grid.
Otherwise, the reference range is set to the start of the range grid.
Units are in meters.
Example: 1000.0
Data Types: double
Source of elevation angle, specified as
Property or Input
port.
Property | The elevation angle comes from the Elevation angle (deg) parameter. |
Input port | The elevation angle comes from an input port. |
Elevation angle used to calculate range-angle response, specified as a
scalar. The angle must be between --90 and 90 degrees. This property applies
when you set the ElevationAngleSource property to
'Property'. The default value of this property is
0.
Angle response span, specified as a real-valued 2-by-1 vector. The object
calculates the range-angle response within the angle range,
[min_angle max_angle].
Example: [-45 45]
Data Types: 12wqqqq` | qdouble
Number of samples in angle span used to calculate range-angle response, specified as a positive integer greater than two.
Example: [256]
Data Types: double
Sensor Arrays Tab
Element Parameters
Coordinate system of custom antenna pattern, specified
az-el or phi-theta. When you
specify az-el, use the Azimuth angles
(deg) and Elevations angles (deg) parameters to
specify the coordinates of the pattern points. When you specify
phi-theta, use the Phi angles (deg)
and Theta angles (deg) parameters to specify the coordinates of the
pattern points.
Dependencies
To enable this parameter, set Element type to
Custom Antenna.
Phi angles of points at which to specify the antenna radiation pattern, specify as a real-valued 1-by-P row vector. P must be greater than 2. Angle units are in degrees. Phi angles must lie between 0° and 360° and be in strictly increasing order.
Dependencies
To enable this parameter, set the Element type parameter to
Custom Antenna and the Coordinate system of custom
antenna pattern parameter to
phi-theta.
Theta angles of points at which to specify the antenna radiation pattern, specify as a real-valued 1-by-Q row vector. Q must be greater than 2. Angle units are in degrees. Theta angles must lie between 0° and 360° and be in strictly increasing order.
Dependencies
To enable this parameter, set the Element type parameter to
Custom Antenna and the Coordinate system of custom
antenna pattern parameter to
phi-theta.
Select this check box to rotate the antenna element pattern to align with the array normal. When not selected, the element pattern is not rotated.
When the antenna is used in an antenna array and the Input Pattern
Coordinate System parameter is az-el,
selecting this check box rotates the pattern so that the x-axis of
the element coordinate system points along the array normal. Not selecting uses the
element pattern without the rotation.
When the antenna is used in an antenna array and Input Pattern Coordinate
System is set to phi-theta, selecting this
check box rotates the pattern so that the z-axis of the element
coordinate system points along the array normal.
Use the parameter in conjunction with the Array normal parameter
of the URA and UCA arrays.
Dependencies
To enable this parameter, set Element type to
Custom Antenna.
Array Parameters
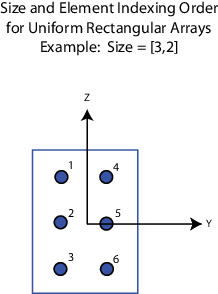
Dimensions of a URA array, specified as a positive integer or 1-by-2 vector of positive integers.
If Array size is a 1-by-2 vector, the vector has the form
[NumberOfArrayRows,NumberOfArrayColumns].If Array size is an integer, the array has the same number of rows and columns.
When you set Specify sensor array as to
Replicated subarray, this parameter applies to each subarray.
For a URA, array elements are indexed from top to bottom along the
leftmost column, and then continue to the next columns from left to right. In this
figure, the Array size value of [3,2] creates an
array having three rows and two columns.
Dependencies
To enable this parameter, set Geometry to
URA.
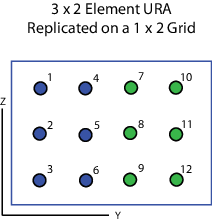
Rectangular subarray grid size, specified as a single positive integer, or a 1-by-2 row vector of positive integers.
If Grid size is an integer scalar, the array has
an equal number of subarrays in each row and column. If
Grid size is a 1-by-2 vector of
the form [NumberOfRows, NumberOfColumns], the
first entry is the number of subarrays along each column. The
second entry is the number of subarrays in each row. A row is
along the local y-axis, and a column is along
the local z-axis. The figure here shows how
you can replicate a 3-by-2 URA subarray using a Grid
size of [1,2].
Dependencies
To enable this parameter, set Sensor
array to Replicated
subarray and Subarrays
layout to
Rectangular.
Version History
Introduced in R2018b