Constrained Electrostatic Nonlinear Optimization Using Optimization Variables
Consider the electrostatics problem of placing 20 electrons in a conducting body. The electrons will arrange themselves in a way that minimizes their total potential energy, subject to the constraint of lying inside the body. All the electrons are on the boundary of the body at a minimum. The electrons are indistinguishable, so the problem has no unique minimum (permuting the electrons in one solution gives another valid solution). This example was inspired by Dolan, Moré, and Munson [1].
When you use optimization variables (the problem-based approach), the objective and nonlinear constraint functions for this example are all Supported Operations for Optimization Variables and Expressions. Therefore, solve uses automatic differentiation to calculate gradients. See Automatic Differentiation in Optimization Toolbox. Without automatic differentiation, this example stops early by reaching the MaxFunctionEvaluations tolerance. For an equivalent solver-based example using Symbolic Math Toolbox™, see Calculate Gradients and Hessians Using Symbolic Math Toolbox.
Problem Geometry
This example involves a conducting body defined by the following inequalities. For each electron with coordinates ,
These constraints form a body that looks like a pyramid on a sphere. To view the body, enter the following code.
[X,Y] = meshgrid(-1:.01:1); Z1 = -abs(X) - abs(Y); Z2 = -1 - sqrt(1 - X.^2 - Y.^2); Z2 = real(Z2); W1 = Z1; W2 = Z2; W1(Z1 < Z2) = nan; % Only plot points where Z1 > Z2 W2(Z1 < Z2) = nan; % Only plot points where Z1 > Z2 hand = figure; % Handle to the figure, for later use set(gcf,Color="w") % White background surf(X,Y,W1,LineStyle="none"); hold on surf(X,Y,W2,LineStyle="none"); view(-44,18)
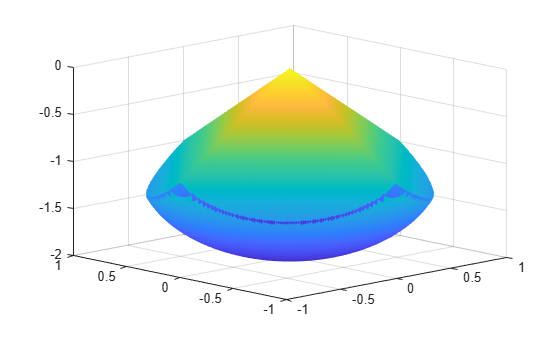
A slight gap exists between the upper and lower surfaces of the figure. This gap is an artifact of the general plotting routine used to create the figure. The routine erases any rectangular patch on one surface that touches the other surface.
Define Problem Variables
The problem has twenty electrons. The constraints give bounds on each and value from –1 to 1, and the value from –2 to 0. Define the variables for the problem.
N = 20; x = optimvar("x",N,LowerBound=-1,UpperBound=1); y = optimvar("y",N,LowerBound=-1,UpperBound=1); z = optimvar("z",N,LowerBound=-2,UpperBound=0); elecprob = optimproblem;
Define Constraints
The problem has two types of constraints. The first, a spherical constraint, is a simple polynomial inequality for each electron separately. Define this spherical constraint.
elecprob.Constraints.spherec = (x.^2 + y.^2 + (z+1).^2) <= 1;
The preceding constraint command creates a vector of N constraints. View the constraint vector using show.
show(elecprob.Constraints.spherec)
((x.^2 + y.^2) + (z + 1).^2) <= arg_RHS
where:
arg2 = 1;
arg1 = arg2(ones(1,20));
arg_RHS = arg1(:);
The second type of constraint in the problem is linear. You can express the linear constraints in different ways. For example, you can use the abs function to represent an absolute value constraint. To express the constraints this way, write a MATLAB function and convert it to an expression using fcn2optimexpr. See Convert Nonlinear Function to Optimization Expression. For a preferable approach that uses only differentiable functions, write the absolute value constraint as four linear inequalities. Each constraint command returns a vector of N constraints.
elecprob.Constraints.plane1 = z <= -x-y; elecprob.Constraints.plane2 = z <= -x+y; elecprob.Constraints.plane3 = z <= x-y; elecprob.Constraints.plane4 = z <= x+y;
Define Objective Function
The objective function is the potential energy of the system, which is a sum over each electron pair of the inverse of their distances:
Define the objective function as an optimization expression. For good performance, write the objective function in a vectorized fashion. See Create Efficient Optimization Problems.
energy = optimexpr(1); for ii = 1:(N-1) jj = (ii+1):N; tempe = (x(ii) - x(jj)).^2 + (y(ii) - y(jj)).^2 + (z(ii) - z(jj)).^2; energy = energy + sum(tempe.^(-1/2)); end elecprob.Objective = energy;
Run Optimization
Start the optimization with the electrons distributed randomly on a sphere of radius 1/2 centered at [0,0,–1].
rng default % For reproducibility x0 = randn(N,3); for ii=1:N x0(ii,:) = x0(ii,:)/norm(x0(ii,:))/2; x0(ii,3) = x0(ii,3) - 1; end init.x = x0(:,1); init.y = x0(:,2); init.z = x0(:,3);
Solve the problem by calling solve.
[sol,fval,exitflag,output] = solve(elecprob,init)
Solving problem using fmincon. Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
sol = struct with fields:
x: [20×1 double]
y: [20×1 double]
z: [20×1 double]
fval = 163.0099
exitflag =
OptimalSolution
output = struct with fields:
iterations: 94
funcCount: 150
constrviolation: 0
stepsize: 2.8395e-05
algorithm: 'interior-point'
firstorderopt: 8.1308e-06
cgiterations: 0
message: 'Local minimum found that satisfies the constraints.↵↵Optimization completed because the objective function is non-decreasing in ↵feasible directions, to within the value of the optimality tolerance,↵and constraints are satisfied to within the value of the constraint tolerance.↵↵<stopping criteria details>↵↵Optimization completed: The relative first-order optimality measure, 8.090886e-07,↵is less than options.OptimalityTolerance = 1.000000e-06, and the relative maximum constraint↵violation, 0.000000e+00, is less than options.ConstraintTolerance = 1.000000e-06.'
bestfeasible: [1×1 struct]
objectivederivative: 'reverse-AD'
constraintderivative: 'closed-form'
solver: 'fmincon'
View Solution
Plot the solution as points on the conducting body.
figure(hand) plot3(sol.x,sol.y,sol.z,"r.",MarkerSize=25) hold off
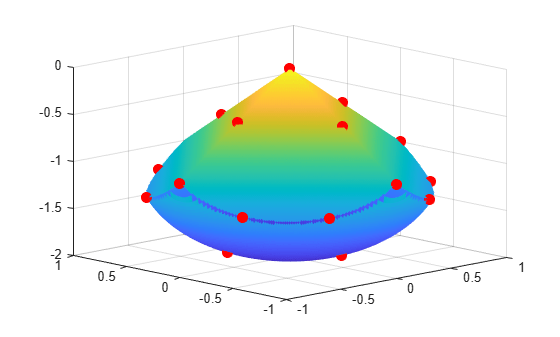
The electrons are distributed fairly evenly on the constraint boundary. Many electrons are on the edges and the pyramid point.
Reference
[1] Dolan, Elizabeth D., Jorge J. Moré, and Todd S. Munson. “Benchmarking Optimization Software with COPS 3.0.” Argonne National Laboratory Technical Report ANL/MCS-TM-273, February 2004.