DAC DC Measurement
Measure DC performance metrics of DAC output
Libraries:
Mixed-Signal Blockset /
DAC /
Measurements & Testbenches
Description
The DAC DC Measurement block measures DAC DC performance metrics such as offset error, gain error, integral nonlinearity (INL), and differential nonlinearity (DNL) errors. You can use the DAC DC Measurement block to validate the DAC architecture models provided in Mixed-Signal Blockset™, or you can use a DAC of your own implementation.
Examples
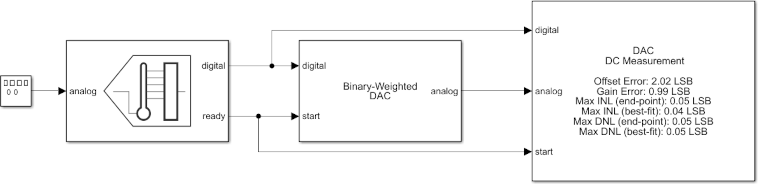
This example shows how to find DC performance metrics such as offset error, gain error, INL, and DNL.
Open the model dac_dc_measure. The model consists of a Signal Generator, a Flash ADC, a Binary Weighted DAC block, and a DAC AC Measurement block.
model = 'dac_dc_measure';
open_system(model)

The Flash ADC acts as the input to the Binary Weighted DAC. The ADC uses an internal start clock whose Conversion start frequency (Hz) is 1e6 and RMS aperture jitter (s) is 1e-12. The input analog frequency to the Flash ADC from the Signal generator is 900 Hz.
The Number of bits of the Binary Weighted DAC is set to 10. The impairments are enabled in the Impairments tab, and the value of the offset error and gain error are set to 2 LSB and 1 LSB, respectively. All other parameters are kept at their default values.
The Number of bits and Conversion start frequency (Hz) of the DAC DC Measurement block are 10 and 1e6, respectively. The Settling time (s) of the DAC DC Measurement block is set to 4e-7, twice the Settling time (s) of the Binary Weighted DAC to ensure the entire transition period is not considered as part of the steady-state DC measurements.
Run the simulation for 0.02558 s. The measured AC performance metrics are displayed on the DAC AC Measurement block.
Ports
Input
Parameters
More About
Version History
Introduced in R2020a