Design MPC Controller for Nonsquare Plants
This topic shows how to configure an MPC controller for a nonsquare plant with unequal numbers of manipulated variables and outputs. Model Predictive Control Toolbox™ software supports plants with an excess of manipulated variables or plants with an excess of outputs.
More Outputs Than Manipulated Variables
When there are excess outputs, you cannot hold all of them at independently chosen setpoints. In this case, you have two options:
Specify that certain outputs do not need to be held at a setpoint by setting their tuning weights to zero.
The controller does not enforce setpoints on outputs with zero weight, so these outputs are free to vary. If the plant has Ne more outputs than manipulated variables, and the static gain matrix is full rank, setting Ne output weights to zero enables the controller to hold the remaining outputs at their setpoints. If any manipulated variables are constrained at steady state, one or more output responses can still exhibit steady-state error, depending on the magnitudes of reference and disturbance signals.
Outputs with zero tuning weights can still be useful. If measured, the controller can use the outputs to help estimate the state of the plant. The outputs can also be used as performance indicators or held within an operating region defined by output constraints.
Enforce setpoints on all outputs by specifying nonzero tuning weights for all of them.
The controller tries to hold all outputs at their respective setpoints. However, due to the limited number of manipulated variables, all output responses exhibit some degree of steady-state error.
You can change the error magnitudes by adjusting the relative values of the output weights. Increasing an output weight decreases the steady-state error in that output at the expense of increased error in the other outputs.
You can configure the output tuning weights at the command line by setting the
Weights.OutputVariables property of the controller.
To configure output tuning weights in MPC Designer, on the Tuning tab, in the Design section, click Weights to open the Weights dialog box.
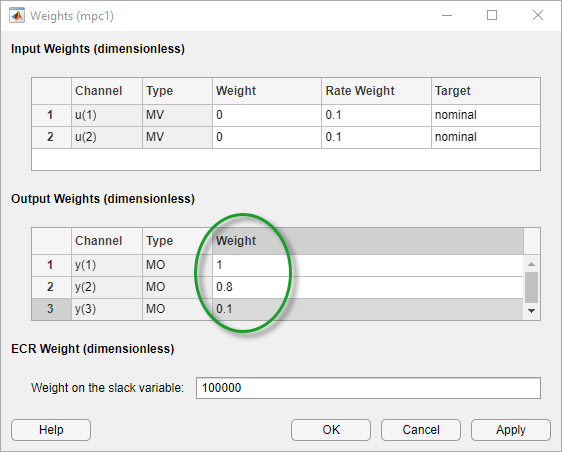
In the Output Weights section, specify the Weight for each output variable. For example, if your plant has two manipulated variables and three outputs, you can:
Set one of the output weights to zero.
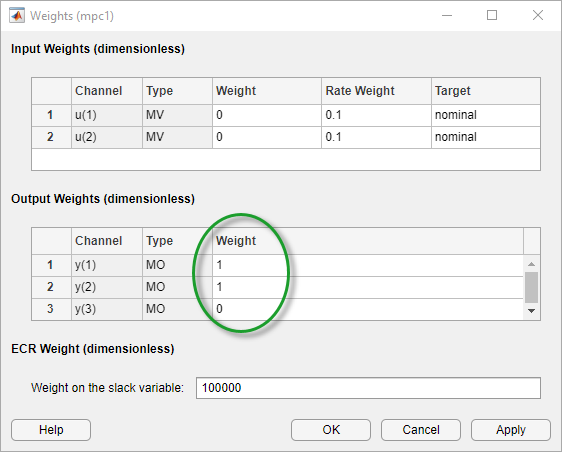
Set all the weights to nonzero values. Outputs with higher weights exhibit less steady-state error.
More Manipulated Variables Than Outputs
When there are excessive manipulated variables, the default MPC controller settings allow for error-free output setpoint tracking. However, the manipulated variables values can drift. You can prevent this drift by setting manipulated variable setpoints. If there are Ne excess manipulated variables, and the static gain matrix is full rank, you can hold Ne of them at target values for economic or operational reasons, and the remaining manipulated variables can attain the values required to eliminate output steady-state error.
To configure a manipulated variable setpoint at the command line, use the
ManipulatedVariables.Target controller property. Then specify an input
tuning weight using the controller Weights.ManipulatedVariables
property.
To define a manipulated variable setpoint in MPC Designer, on the Tuning tab, in the Design section, click Weights.
In the Weights dialog box, in the Input Weights section, specify a nonzero Weight value for the manipulated variable.
Specify a Target value for the manipulated variable.
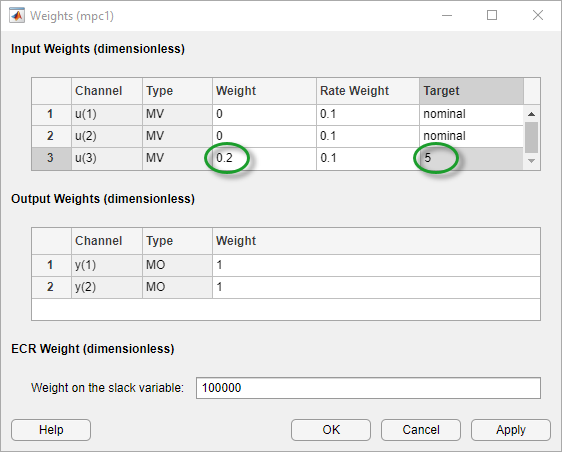
By default, the manipulated variable Target is
nominal, which means that it tracks the nominal value specified in the
controller properties.
Note
Because nominal values apply to all controllers in an MPC Designer session, changing a Nominal Value updates all controllers in the app. The Target value, however, is specific to each individual controller.
The magnitude of the manipulated variable weight indicates how much the input can deviate from its setpoint. However, there is a tradeoff between manipulated variable target tracking and output reference tracking. If you want to have better output setpoint tracking performance, use a relatively small input weight. If you want the manipulated variable to stay close to its target value, increase its input weight relative to the output weight.
You can also avoid drift by constraining one or more manipulated variables to a narrow operating region using hard constraints. To define constraints in MPC Designer, on the Tuning tab, in the Design section, click Constraints to open the Constraints dialog box.
In the Input Constraints section, specify Max and Min constraints values.