atan2
Compute four-quadrant arctangent
Libraries:
Motor Control Blockset /
Controls /
Math Transforms
Motor Control Blockset HDL Support /
Controls /
Math Transforms
Description
The atan2 block performs the four-quadrant arctangent on two real numbers.
Equations
This equation describes how the block computes the four-quadrant arctangent
(θ).
where:
Ports
Input
Output
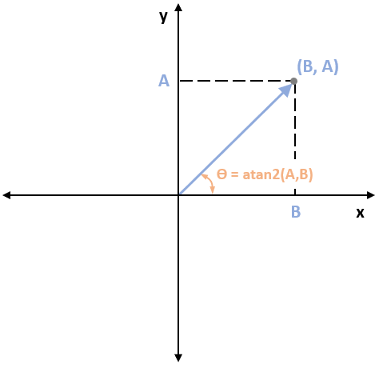
Angle represented by arctangent. This is the angle made by a vector from the origin to a specified point (x,y) with the positive x-axis.
Data Types: single | double | fixed point
The following figure shows the representation of input values A, B, and arctangent on the x-y coordinate plane.
Parameters
Extended Capabilities
Version History
Introduced in R2020a