MATLAB Project for FOC of PMSM with Quadrature Encoder
This MATLAB® project provides a motor control example model that uses field-oriented control (FOC) to run a three-phase permanent magnet synchronous motor (PMSM) in different modes of operation. Implementing the FOC algorithm needs real-time rotor position feedback. This example uses a quadrature encoder sensor to measure the rotor position. For details about FOC, see Field-Oriented Control.
The example can run a motor in these modes:
StandBy - In this mode, the motor stops running because the inverter outputs zero volts.
Calibration - In this mode, the example calibrates the ADC (or current) offset and the quadrature encoder offset (offset between the
d-axis of the rotor and the encoder index pulse position as detected by the quadrature encoder sensor).
Open Loop Speed Control - In this mode, the example controls the rotor speed by running the motor in the open-loop control.
Closed Loop Torque Control - In this mode, the example controls the torque output of the motor by running it in the closed-loop control.
Closed Loop Speed Control - In this mode, the example controls the rotor speed by running the motor in the closed-loop control.
Note: When running the example model on the hardware, we recommend that you stop the motor (by switching to the StandBy mode) before transitioning from one operating mode to another.
Open MATLAB Project
Use one of these methods to open the MATLAB project to follow this workflow:
1. Click Open Project.
2. Run the following command to access the supporting files of the example and open the MATLAB project.
openExample('mcb/PMSMQepWorkflowExample');
Model
The MATLAB project includes the model QuadratureEncoderWorkflow.
This model (also called target model) automatically opens when you open the MATLAB project. You can also use the Project window to open this model available in the model folder.

Required MathWorks Products
To simulate model:
Motor Control Blockset™
Stateflow®
To generate code and deploy model:
1. Motor Control Blockset™
2. Embedded Coder®
3. C2000™ Microcontroller Blockset
4. Fixed-Point Designer™ (only needed for optimized code generation)
5. Stateflow®
Prerequisites
1. Obtain the motor and inverter parameters. The MATLAB project uses default motor and inverter parameters that you can replace with values from either the motor and inverter datasheets or from other sources.
You can estimate the parameters for the motor that you want to use with the motor control hardware, by using the Motor Control Blockset parameter estimation tool. For instructions, see .
The parameter estimation tool updates the motorParam variable (in the MATLAB® workspace) with the estimated motor parameters.
2. Update the motor and inverter parameters in the mcb_qep_data.m parameter script associated with the MATLAB project. This script automatically opens when you open the MATLAB project. You can also use the Project window to open this script from the utils folder.
3. Click Run on the Editor tab to run the parameter script and update the script parameters in the data dictionary. The data dictionary file (pmsm_qep_data.sldd) is available inside the data folder in the Project window.
Note: When you simulate the target model or run it on the hardware, if you change any parameter value in the parameter script, you must run the parameter script to update the data dictionary.
Simulate Model
Follow these steps to simulate the target model.
1. Open the target model included in the MATLAB project.
2. Turn the Stop-Start slider switch available in the Simulation Dashboard area to the Start position to allow the model to simulate and run the motor.
During simulation, you can turn the switch to the Stop position anytime to immediately stop the motor.
3. Click Run on the Simulation tab to simulate the model.
Open Loop Speed Control mode
1. Select Open Loop Speed Control in the Simulation Dashboard > Operating Modes area of the target model.
2. Enter the values in the Reference Speed [RPM] and Load Torque [Nm] fields.
Note: In the open-loop mode, the motor runs only if the load torque value is either zero or a very small value. If you use a high load torque value, the motor can stop.
Closed Loop Torque Control mode
1. Select Closed Loop Torque Control in the Simulation Dashboard > Operating Modes area of the target model.
2. Enter the reference torque value in the Reference Torque [Nm] field.
3. You can simulate the locked rotor situation by moving the Rotor Lock slider switch to On position.
When you move the switch to Off position, the rotor rotates freely within a maximum speed limit that is defined by the variable data.pmsm.wLimit_TorqueMode in the mcb_qep_data.m parameter script.
Note: The Rotor Lock slider switch is applicable only when performing simulation in this operating mode. It has no effect during the other modes.
Closed Loop Speed Control mode
1. Select Closed Loop Speed Control in the Simulation Dashboard > Operating Modes area of the target model.
2. Enter the values in the Reference Speed [RPM] and Load Torque [Nm] fields.
NOTE:
In the closed-loop mode, the motor runs only if the load torque value is less than or equal to the rated torque of the motor. If you use a higher load torque, the motor starts running in the opposite direction.
When you simulate the target model, the calibration operating mode produces an invalid simulation output because this mode is designed to calibrate the hardware setup.
When simulating this example, you can observe the measured speed and torque values in the Measured Torque [Nm] and Measured Speed [RPM] fields in the Simulation Dashboard area.
Generate Code and Deploy Model to Target Hardware
This section shows you how to generate code and run the FOC algorithm on the target hardware.
In addition to the target model, the MATLAB project uses a host model. The host model, which is a user interface to the controller hardware board, runs on the host computer. To use the host model, first deploy the target model to the controller hardware board. The host model uses serial communication to command the model, run (and control) the motor in the selected operating mode, and collect and display the calibration output, and debug signals from the controller.
Required Hardware
The example supports this hardware configuration.
LAUNCHXL-F28379D controller + (BOOSTXL-DRV8305 or BOOSTXL-3PHGANINV) inverter
You can select one of these inverters by setting the mcb_SetInverterParameters argument in the parameter script file (mcb_qep_data.m) to one of these values:
BoostXL-DRV8305
BOOSTXL-3PhGaNInv
For connections related to this hardware configuration, see LAUNCHXL-F28069M and LAUNCHXL-F28379D Configurations.
Generate Code and Run Model on Target Hardware
1. Simulate the target model and observe the simulation results.
2. Complete the hardware connections.
3. Open the target model. If you want to change the default hardware configuration settings for the model, see Model Configuration Parameters.
4. To ensure that CPU2 is not configured to use the board peripherals intended for CPU1, load a sample program to CPU2 of LAUNCHXL-F28379D, for example, program that operates the CPU2 blue LED by using GPIO31 (c28379D_cpu2_blink.slx). For more information about the sample program or model, see the Task 2 - Create, Configure and Run the Model for TI Delfino F28379D LaunchPad (Dual Core) section in Getting Started with Texas Instruments C2000 Microcontroller Blockset (C2000 Microcontroller Blockset).
5. Click Build, Deploy & Start on the Hardware tab to deploy the target model to the hardware.
6. Click the host model hyperlink in the target model to open the associated host model.
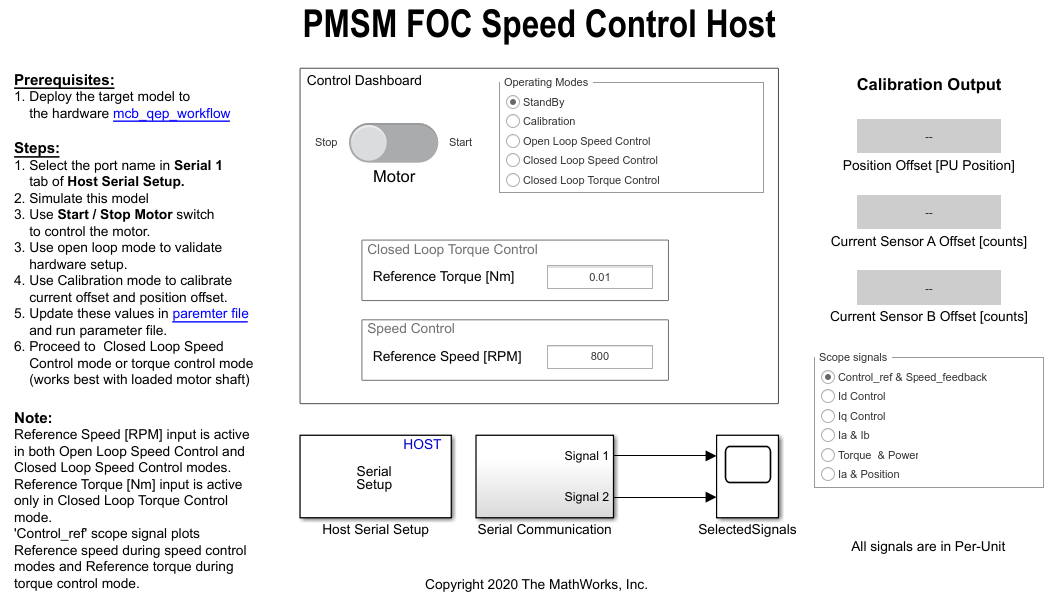
7. Turn the Stop-Start slider switch in the Control Dashboard area to the Start position to allow the model to run the motor.
When running the motor using the target hardware, turn the switch to the Stop position anytime to immediately stop the motor.
8. In the host model, open the blocks Host Serial Setup, Host Serial Receive, and Host Serial Transmit, and select a Port.
9. Click Run on the Simulation tab to run the host model.
Note: Always stop the motor (by using the StandBy mode) before changing the operating mode.
Instructions for Calibration mode
1. Select StandBy in the Control Dashboard > Operating Modes area of the host model to stop the motor.
2. Select Calibration in the Control Dashboard > Operating Modes area of the host model.
The controller runs the motor and performs ADC (or current) offset and quadrature encoder offset calibration and updates these offset parameters in the data dictionary file (pmsm_qep_data.sldd):
pmsm.PositionOffset
inverter.CtSensAOffset
inverter.CtSensBOffset
The host model also displays the offset values in these fields available in the Calibration Output area:
Position Offset
Current Sensor Offset A
Current Offset B
3. Update these offset parameters in the parameter script file (QuadratureEncoderWorkflowParameters.m) before you run the parameter script:
data.pmsm.PositionOffset
data.inverter.CtSensAOffset
data.inverter.CtSensBOffset
Note: Update the parameter script immediately to avoid losing these offset values. MATLAB project rewrites the data dictionary (with the existing parameter script values) every time you run the parameter script.
For details about these parameters, see Estimate Control Gains and Tune Control Parameters.
4. After the calibration completes, the offset parameters are erased if you reset the target hardware. Click Build, Deploy & Start on the Hardware tab to program the target hardware with the calibrated offset parameters.
Instructions for Open Loop Speed Control mode
1. Select StandBy in the Control Dashboard > Operating Modes area of the host model to stop the motor.
2. Select Open Loop Speed Control in the Control Dashboard > Operating Modes area of the host model.
The controller runs the motor in the open-loop control.
3. You can change the default reference speed value by using the Reference Speed [RPM] in the Control Dashboard > Speed Control area of the host model.
Note:
Be cautious when providing a reference speed. The motor may not run optimally at all speeds. We recommend that you use a low speed initially and increase it gradually.
In the open-loop mode, the motor runs only if the load is either zero or negligible. If you use a higher load, the motor stops running.
You do not need to calibrate the ADC (or current) and quadrature encoder sensor when you run the motor in open-loop control.
Instructions for Closed Loop Speed Control mode
1. Run the motor in the open-loop configuration to validate the hardware setup. Follow the steps described in the Instructions for Open Loop Speed Control mode section.
2. Perform ADC (or current) offset and quadrature encoder offset calibration. Follow the steps described in the Instructions for Calibration mode section.
3. Select StandBy in the Control Dashboard > Operating Modes area of the host model to stop the motor.
4. Select Closed Loop Speed Control in the Control Dashboard > Operating Modes area of the host model.
The controller runs the motor in the closed-loop control and controls the rotor speed.
5. You can change the default reference speed value by using the Reference Speed [RPM] in the Control Dashboard > Speed Control area of the host model.
Note: In the closed-loop mode, the motor runs only if the load torque is less than or equal to the rated load of the motor. If you use a higher load torque, the motor stops running.
Instructions for Closed Loop Torque Control mode
1. Run the motor in the open-loop configuration to validate the hardware setup. Follow the steps described in the Instructions for Open Loop Speed Control mode section.
2. Perform the ADC (or current) offset and quadrature encoder offset calibration if you have not done so earlier. Follow the steps described in the Instructions for Calibration mode section.
3. Select StandBy in the Control Dashboard > Operating Modes area of the host model to stop the motor.
4. Select Closed Loop Torque Control in the Control Dashboard > Operating Modes area of the host model.
The controller runs the motor in the closed-loop configuration and controls the torque of the motor.
5. You can change the default reference torque value by using the Reference Torque [Nm] in the Control Dashboard > Speed Control area of the host model.
You can configure the maximum speed limit of the motor in the closed loop torque control mode using the variable data.pmsm.wLimit_TorqueMode in the mcb_qep_data.m parameter script.
When running the motor using the target hardware in these operating modes, you can select the debug signals (in the Scope signals area) that you want to monitor in the SelectedSignals time scope.