Half-Precision Field-Oriented Control Algorithm
This example shows how to implement a Field-Oriented Control (FOC) algorithm for a Permanent Magnet Synchronous Machine (PMSM). The example shows both a single-precision floating-point implementation and a half-precision floating-point implementation. When an algorithm contains large or unknown dynamic ranges (for example integrators in feedback loops) or when the algorithm uses operations that are difficult to design in fixed-point (for example, atan2), it can be advantageous to use floating-point representations. The half-precision data type occupies only 16 bits of memory, but its floating-point representation enables it to handle wider dynamic ranges than integer or fixed-point data types of the same size.
Load the data required to simulate the model.
focModelData
Open the ex_foc_current model. This model uses the same source block for two versions of a field-oriented control algorithm. The first version uses single-precision data types, while the second uses half-precision data types.
model = 'ex_foc_current.slx';
open_system(model)

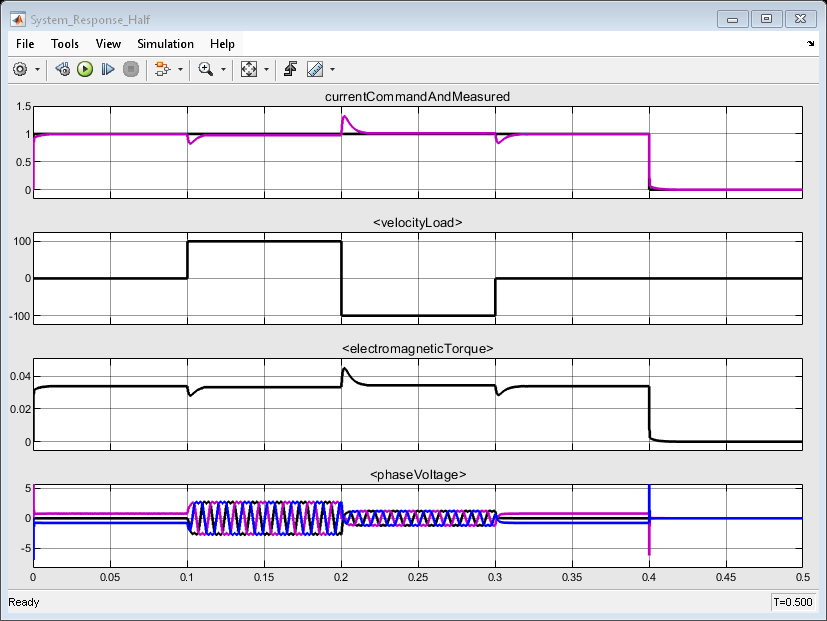
Simulate the model. You can see from the scope that the response of the single-precision implementation is identical to the response of the half-precision implementation.
sim(model)
ans =
Simulink.SimulationOutput:
logTestBench: [1x1 Simulink.SimulationData.Dataset]
SimulationMetadata: [1x1 Simulink.SimulationMetadata]
ErrorMessage: [0x0 char]