Scenario Generation
In automated driving applications, scenario generation is the process of building virtual scenarios from real-world vehicle data recorded from global positioning system (GPS), inertial measurement unit (IMU), camera, and lidar sensors. Automated Driving Toolbox™ provides functions and tools to automate scenario generation process. You can preprocess sensor data, extract roads, localize actors, and get actor trajectories to create an accurate digital twin of a real-world scenario. Simulate the generated scenario and test your automated driving algorithms against real-world data.
To generate scenarios from recorded sensor data, download the Scenario Builder for Automated Driving Toolbox support package from the Add-On Explorer. For more information on downloading add-ons, see Get and Manage Add-Ons.
Functions
getMapROI | Geographic bounding box coordinates from GPS data (Since R2022b) |
roadprops | Extract road properties from road network file or map data (Since R2022b) |
selectActorRoads | Extract properties of roads in path of actor (Since R2022b) |
updateLaneSpec | Update lane specifications using sensor detections (Since R2022b) |
actorprops | Generate actor properties from track list (Since R2022b) |
actorTracklist | Store recorded actor track list data with timestamps (Since R2023a) |
laneData | Store recorded lane boundary data with timestamps (Since R2023a) |
laneBoundaryTracker | Track lane boundaries (Since R2023a) |
laneBoundaryDetector | Detector for lane boundaries in images (Since R2023a) |
roadrunnerLaneInfo | Generate lane information in RoadRunner HD Map format from lane boundary points (Since R2023a) |
roadrunnerStaticObjectInfo | Generate static object and sign information in RoadRunner HD Map format (Since R2023a) |
Topics
- Overview of Scenario Generation from Recorded Sensor Data
Learn the basics of generating scenarios from recorded sensor data.
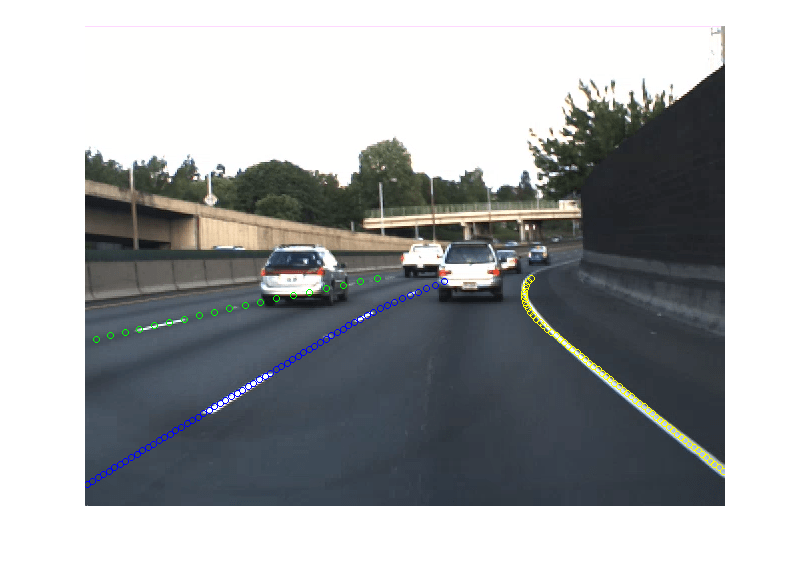
- Preprocess Lane Detections for Scenario Generation
Format lane detection data to update lane specifications for scenario generation.
- Smooth GPS Waypoints for Ego Localization
Create jitter-limited ego trajectory by smoothing GPS and IMU sensor data.
- Generate RoadRunner Scene Using Labeled Camera Images and GPS Data
Generate RoadRunner scene using labeled camera images and GPS data.
- Generate Scenario from Actor Track List and GPS Data
Generate ASAM OpenSCENARIO® v1.0 file using recorded actor tracklist and GPS data.
- Generate RoadRunner Scene from Recorded Lidar Data
Generate RoadRunner HD map from recorded lidar data using pretrained deep learning model.
- Generate High Definition Scene from Lane Detections and OpenStreetMap
Generate HD road scene using recorded lane detections, GPS data, and OpenStreetMap® data.
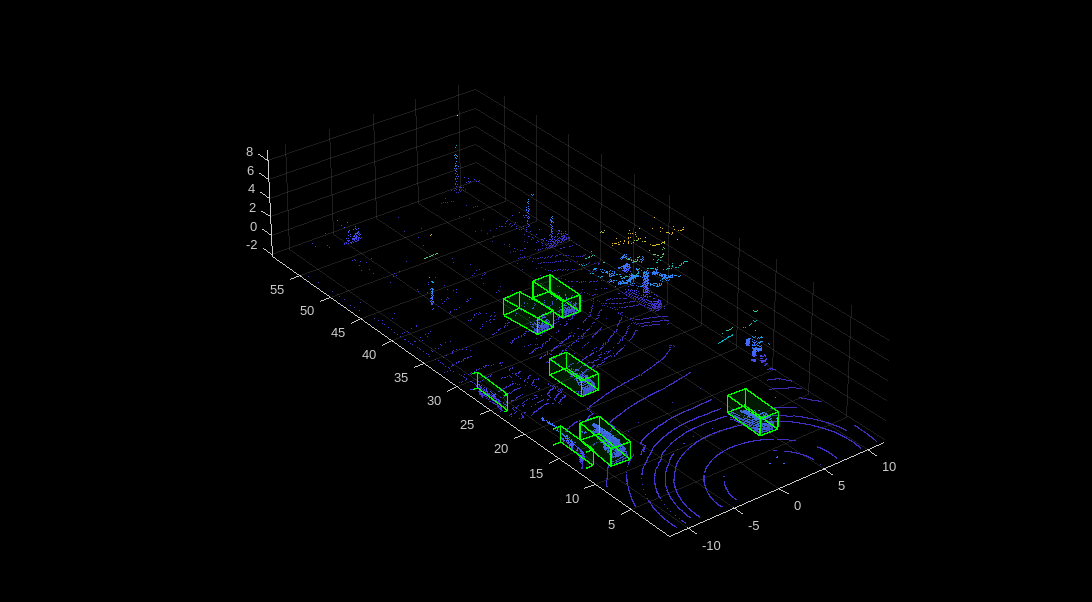
- Extract Vehicle Track List from Recorded Camera Data for Scenario Generation
Extract actor track list from raw camera data for scenario generation.
- Extract 3D Vehicle Information from Recorded Monocular Camera Data for Scenario Generation
Extract 3D vehicle information from recorded monocular camera data for scenario generation.
- Extract Key Scenario Events from Recorded Sensor Data
Extract key scenario events from recorded sensor data.
- Generate RoadRunner Scene with Traffic Signs Using Recorded Sensor Data
Generate RoadRunner scene with traffic signs using recorded sensor data.
- Generate RoadRunner Scene Using Aerial Lidar Data
Generate RoadRunner scenario from aerial lidar data.
Featured Examples






You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)