pade
Padé approximation of models with time delay
Description
pade approximates time delays for continuous-time LTI models.
Such approximations are useful to model time delay effects such as transport and computation
delays within the context of continuous-time systems. The Laplace transform of a time delay of
T seconds is exp(–sT). This exponential transfer
function is approximated by a rational transfer function using the Padé approximation formulas
from [1].
To approximate discrete-time models, use absorbDelay.
See Time Delays in Linear Systems for more information about models with time delays.
sysx = pade(sys,NU,NY,NINT)NU, NY, and NINT,
respectively. You can use scalar values for NU, NY, or
NINT to specify a uniform approximation order. You can also set some
entries of NU, NY, or NINT to
Inf to prevent approximation of the corresponding delays.
Examples
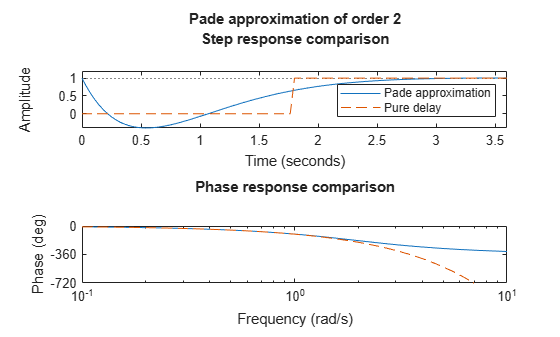
Second-Order Padé Approximation
For this example, compute the delay-free numerator and denominator coefficients for a time delay of 1.8 seconds for a second-order system.
T = 1.8; N = 2; [num,den] = pade(T,N)
num = 1×3
1.0000 -3.3333 3.7037
den = 1×3
1.0000 3.3333 3.7037
You can also plot the step and phase response of the delay-free approximation and the original system with time delay. Use the pade command without output arguments to generate the comparison plots.
pade(T,N)
Padé Approximation of Continuous-Time Open-Loop Model
For this example, find the Padé approximation of the following continuous-time open loop system.
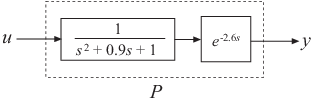
Create the open-loop system with an output delay.
s = tf('s');
T = 2.6;
sys = exp(-T*s)/(s^2+0.9*s+1)sys =
1
exp(-2.6*s) * ---------------
s^2 + 0.9 s + 1
Continuous-time transfer function.
sys is a second-order transfer function (tf) object with a time delay.
Next, compute the first-order Padé approximation of sys.
sysx = pade(sys,1)
sysx =
-s + 0.7692
----------------------------------
s^3 + 1.669 s^2 + 1.692 s + 0.7692
Continuous-time transfer function.
pade replaces all time delays in sys with a first-order approximation. Therefore, sysx is a third-order transfer function with no delays.
You can also plot and compare the step and phase response of the delay-free approximated model and the model with time-delay. Use the time delay and order values to create the plot.
pade(T,1)
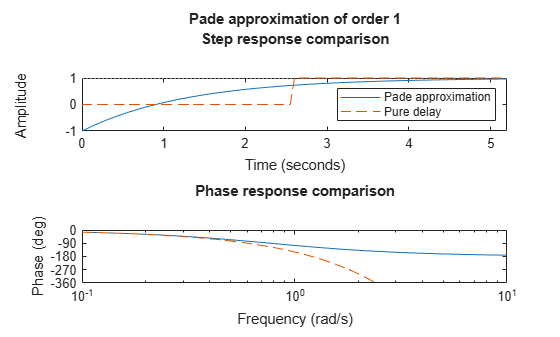
Third-Order Padé Approximation
Compute a third-order Padé approximation of a 0.1-second I/O delay.
s = tf('s');
sys = exp(-0.1*s);
sysx = pade(sys,3)sysx = -s^3 + 120 s^2 - 6000 s + 1.2e05 -------------------------------- s^3 + 120 s^2 + 6000 s + 1.2e05 Continuous-time transfer function.
Here, sys is a dynamic system representation of the exact time delay of 0.1 s. sysx is a transfer function that approximates that delay.
Compare the time and frequency responses of the true delay and its approximation. Calling the pade command without output arguments generates the comparison plots. In this case the first argument to pade is just the magnitude of the exact time delay, rather than a dynamic system representing the time delay.
pade(0.1,3)
Padé Approximation of MIMO State-Space Model
For this example, consider the MIMO state-space model sys contained in ssModel.mat. sys has two inputs and three outputs, and contains input, output and internal delays.
Load the data and examine sys.
load('ssModel.mat','sys') sys
sys =
A =
x1 x2
x1 2.893 1.497
x2 -0.1138 -0.5279
B =
u1 u2
x1 -1.334 -4.155
x2 1.127 -0.06161
C =
x1 x2
y1 -2.416 -0.6317
y2 1.688 1.063
y3 3.509 1.84
D =
u1 u2
y1 1.019 1.999
y2 0 -3.658
y3 0 -5.885
(values computed with all internal delays set to zero)
Input delays (seconds): 1.5 0.3
Output delays (seconds): 0.2 0.8 1.3
Internal delays (seconds): 2.1 1.3
Continuous-time state-space model.
Specify the approximation orders for the input, output, and internal delays, and compute the Padé approximation. Set approximation orders to Inf to prevent approximation of the corresponding delays.
NU = [3 Inf]; NY = [1 Inf 2]; NINT = [Inf 2]; sysx = pade(sys,NU,NY,NINT)
sysx =
A =
x1 x2 x3 x4 x5 x6 x7 x8 x9 x10
x1 -10 0 0 -9.665 -2.527 -7.305 0 16.3 0 4.527
x2 0 -4.615 -3.55 14.04 7.358 21.51 0 0 0 0
x3 0 2 0 0 0 0 0 0 0 0
x4 0 0 0 2.893 1.497 4.115 0 -5.335 0 -1.482
x5 0 0 0 -0.1138 -0.5279 -0.2169 0 4.51 0 1.253
x6 0 0 0 -8.011 -3.193 -4.615 -3.55 0 0 0
x7 0 0 0 0 0 2 0 0 0 0
x8 0 0 0 0 0 0 0 -8 -6.667 -2.222
x9 0 0 0 0 0 0 0 4 0 0
x10 0 0 0 0 0 0 0 0 4 0
B =
u1 u2
x1 -4.075 7.996
x2 0 -23.54
x3 0 0
x4 1.334 -4.155
x5 -1.127 -0.06161
x6 0 10.1
x7 0 0
x8 4 0
x9 0 0
x10 0 0
C =
x1 x2 x3 x4 x5 x6 x7 x8 x9 x10
y1 5 0 0 2.416 0.6317 1.826 0 -4.075 0 -1.132
y2 0 0 0 1.688 1.063 3.074 0 0 0 0
y3 0 -2.308 0 3.509 1.84 5.377 0 0 0 0
D =
u1 u2
y1 1.019 -1.999
y2 0 -3.658
y3 0 -5.885
(values computed with all internal delays set to zero)
Input delays (seconds): 0 0.3
Output delays (seconds): 0 0.8 0
Internal delays (seconds): 2.1
Continuous-time state-space model.
The resultant approximation sysx still has specific input, output, and internal delays where the corresponding approximation orders are Inf.
Input Arguments
Output Arguments
Limitations
Padé approximation is valid only at low frequencies and provides better frequency-domain approximation than time-domain approximation. Therefore, compare the true and approximate responses to choose the right approximation order and check the approximation validity.
High-order Padé approximations produce transfer functions with clustered poles. Because such pole configurations tend to be very sensitive to perturbations, avoid Padé approximations with order
N>10.
References
[1] Golub, Gene H., and Charles F. Van Loan. Matrix Computations. 2nd ed. Johns Hopkins Series in the Mathematical Sciences 3. Baltimore, Md: Johns Hopkins University Press, 1989. pp. 557-558.
Version History
Introduced before R2006a
See Also
c2d | absorbDelay | thiran | delay2z
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)