showTunable
Display current value of tunable Control Design Blocks in Generalized Model
Syntax
Description
Examples
Display Block Values of Tuned Control System Model
Tune the following control system using systune, and display the values of the tunable blocks.
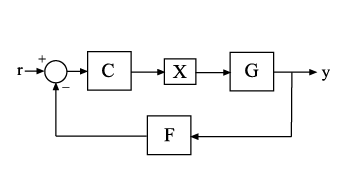
The control structure includes a PI controller C and a tunable low-pass filter in the feedback path. The plant G is a third-order system.
Create models of the system components and connect them together to create a tunable closed-loop model of the control system.
s = tf('s'); num = 33000*(s^2 - 200*s + 90000); den = (s + 12.5)*(s^2 + 25*s + 63000); G = num/den; C0 = tunablePID('C','pi'); a = realp('a',1); F0 = tf(a,[1 a]); X = AnalysisPoint('X'); T0 = feedback(G*X*C0,F0); T0.InputName = 'r'; T0.OutputName = 'y';
T0 is a genss model that has two tunable blocks, the PI controller, C, and the parameter, a. T0 also contains the switch block X.
Create a tuning requirement that forces the output y to track the input r, and tune the system to meet that requirement.
Req = TuningGoal.Tracking('r','y',0.05); [T,fSoft,~] = systune(T0,Req);
Final: Soft = 1.43, Hard = -Inf, Iterations = 60
systune finds values for the tunable parameters that optimally meet the tracking requirement. The output T is a genss model with the same Control Design Blocks as T0. The current values of those blocks are the tuned values.
Examine the tuned values of the tunable blocks of the control system.
showTunable(T)
C =
1
Kp + Ki * ---
s
with Kp = 0.000433, Ki = 0.00525
Name: C
Continuous-time PI controller in parallel form.
-----------------------------------
a = 67.8
showTunable displays the values of the tunable blocks only. If you use showBlockValue instead, the display also includes the switch block X.
Input Arguments
Tips
Displaying the current values of tunable blocks is useful, for example, after you have tuned the free parameters of the model using a tuning command such as
systune.showTunabledisplays the current values of the tunable blocks only. To display the current values of all Control Design Blocks in a model, including tunable, uncertain, and switch blocks, useshowBlockValue.
Version History
Introduced in R2012b
See Also
genss | getBlockValue | setBlockValue | showBlockValue | systune
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)