Modeling a Six Degree of Freedom Motion Platform
This example shows how to connect an Aerospace Blockset™ six degree of freedom equation of motion block. This model calculates its output using Euler angles in the equations of motion.
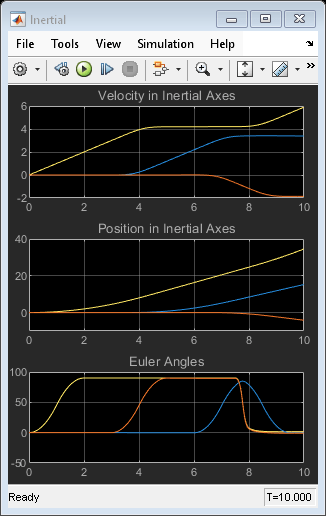
Two Scope blocks plot the block output. Inertial plots the velocity and position in the flat Earth reference frame and the Euler rotation angles. Body plots the velocity in the body-fixed frame and the body rotational rates.
To modify the applied forces and moments for the block, open the slider blocks and change the sliders for the scalar gains.