Coulomb and Viscous Friction
Model discontinuity at zero, with linear gain elsewhere
Libraries:
Simulink /
Discontinuities
HDL Coder /
Discontinuities
Description
The Coulomb and Viscous Friction block models Coulomb (static) and viscous (dynamic) friction. The block models a discontinuity at zero and a linear gain otherwise.
The block output matches the MATLAB® result for:
y = sign(x) .* (Gain .* abs(x) + Offset)
where y is the output, x is
the input, Gain is the signal gain for nonzero
input values, and Offset is the Coulomb friction.
The block accepts one input and generates one output. The input can be a scalar, vector, or matrix with real and complex elements.
For a scalar input,
GainandOffsetcan have dimensions that differ from the input. The output is a scalar, vector, or matrix depending on the dimensions ofGainandOffset.For a vector or matrix input,
GainandOffsetmust be scalar or have the same dimensions as the input. The output is a vector or matrix of the same dimensions as the input.
Examples
Scalar Expansion with the Coulomb and Viscous Friction Block
This example shows a model with a scalar input to a Coulomb & Viscous Friction block that uses scalar expansion to output a vector.
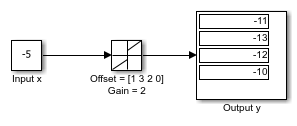
Double click the friction block to see the parameters. Coefficient of viscous friction (Gain) is a scalar value 2, but Coulomb friction value (Offset) is a vector value [1 3 2 0] . Therefore, the block uses element-wise scalar expansion to compute the output.
Each output is calculated using this formula.

For example, the first offset 1 is calculated as follows.


If the dimensions for the input and Offset are the same, then no expansion is necessary.
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Extended Capabilities
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)