fntlr
Taylor coefficients
Syntax
taylor = fntlr(f,dorder,x)
Description
taylor = fntlr(f,dorder,x) returns the
nonnormalized Taylor coefficients, up to the given order dorder
and at the given x, of the function described in
f.
For a univariate function and a scalar x, this is the
vector
If, more generally, the function in f is
d-valued with d>1 or even
prod(d)>1 and/or is m-variate for some
m>1, then dorder is expected to be an
m-vector of positive integers, x is
expected to be a matrix with m rows, and, in that case, the
output is of size [prod(d)*prod(dorder),size(x,2)], with its j-th
column containing
for i1=1:dorder(1), ..., im=1:dorder(m).
Here, Dif is the partial derivative of
f with respect to its ith argument.
Examples
If f contains a univariate function and x is
a scalar or a 1-row matrix, then fntlr(f,3,x) produces the same
output as the statements
df = fnder(f); [fnval(f,x); fnval(df,x); fnval(fnder(df),x)];
As a more complicated example, look at the Taylor vectors of order 3 at 21 equally spaced points for the rational spline whose graph is the unit circle:
ci = rsmak('circle'); in = fnbrk(ci,'interv');
t = linspace(in(1),in(2),21); t(end)=[];
v = fntlr(ci,3,t);
We plot ci along with the points v(1:2,:),
to verify that these are, indeed, points on the unit circle.
fnplt(ci), hold on, plot(v(1,:),v(2,:),'o')
Next, to verify that v(3:4,j) is a vector tangent to the circle
at the point v(1:2,j), we use the MATLAB®
quiver command to add the corresponding arrows to our
plot:
quiver(v(1,:),v(2,:),v(3,:),v(4,:))
Finally, what about v(5:6,:)? These are second derivatives, and
we add the corresponding arrows by the following quiver command,
thus finishing First and Second Derivative of a Rational Spline Giving a Circle.
quiver(v(1,:),v(2,:),v(5,:),v(6,:)), axis equal, hold off
First and Second Derivative of a Rational Spline Giving a Circle
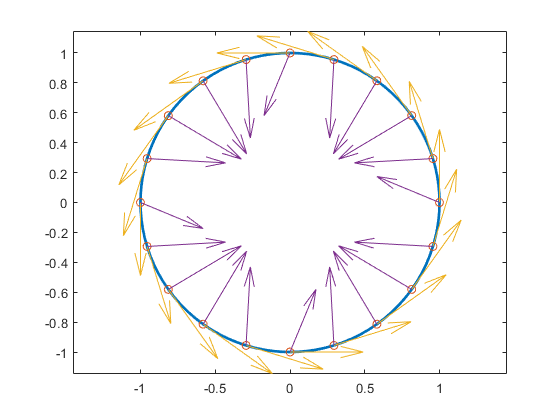
Now, our curve being a circle, you might have expected the 2nd derivative arrows
to point straight to the center of that circle, and that would have been indeed the
case if the function in ci had been using arclength as its
independent variable. Since the parameter used is not arclength, we use the formula,
given in Example: B-form Spline Approximation to a Circle, to
compute the curvature of the curve given by ci at these selected
points. For ease of comparison, we switch over to the variables used there and then
simply use the commands from there.
dspt = v(3:4,:); ddspt = v(5:6,:); kappa = abs(dspt(1,:).*ddspt(2,:)-dspt(2,:).*ddspt(1,:))./... (sum(dspt.^2)).^(3/2); max(abs(kappa-1)) ans = 2.2204e-016
The numerical answer is reassuring: at all the points tested, the curvature is 1 to within roundoff.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)